管理人のイエイリです。
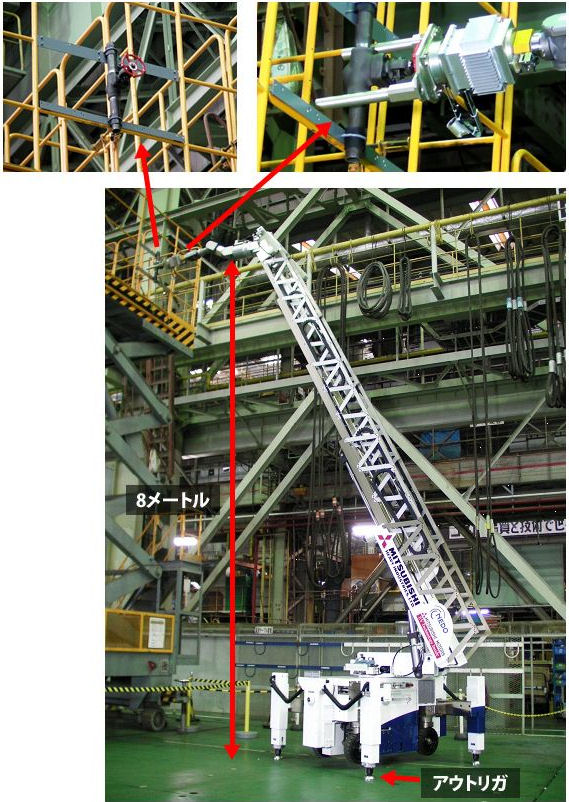
東日本大震災で起こった福島第一原子力発電所の事故からもうすぐ2年。現場の復旧作業に向けて、三菱重工業は高さ8mまでの高所作業ができる遠隔作業ロボット「MHI-Super Giraffe(MARS-C)」(スーパージラフ)を開発しました。
 |
|
8mまでの高所作業ができる「MHI-Super Giraffe」(写真・資料:三菱重工業。以下同じ) |
このロボットは、新エネルギー・産業技術総合開発機構(NEDO)の「災害対応無人化システム研究開発プロジェクト」による委託を受け、東京電力の福島第一原発での作業を想定して開発されたものです。
その特徴は、様々な作業に対応できるように拡張性を高くしたことで、
ナ、ナ、ナ、ナント、
バルブの開閉や溶接
など、様々な作業に対応できるようになっていることです。
 |
|
高所でのバルブ開閉作業の例 |
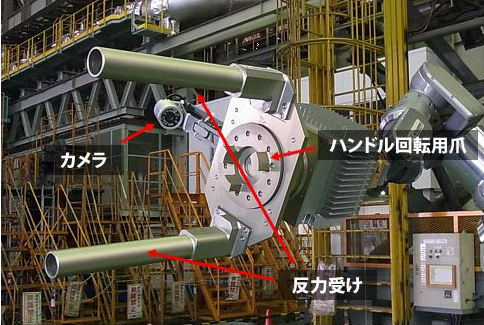 |
| カメラが付いた先端部。手先のツールは簡単に交換でき、様々な作業に対応できる |
 |
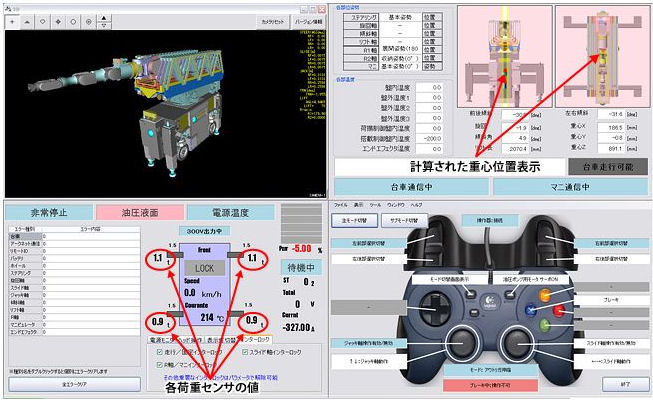
| 操作用パソコン(右)と、カメラ画像表示パソコン(左)。操作はゲームコントローラーで行う |
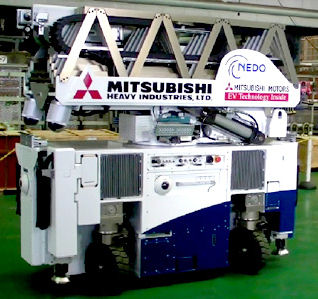
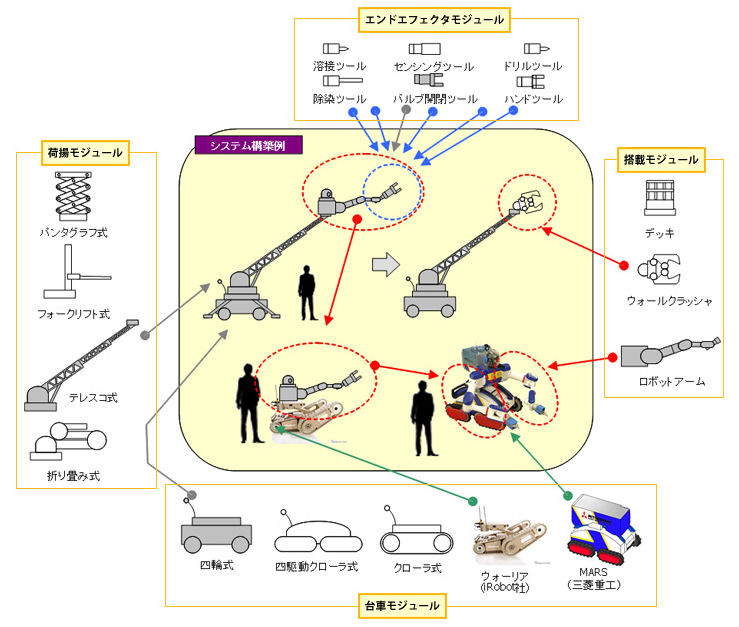
このロボットは、台車モジュール(移動機構)、荷揚げモジュール(伸縮梯子機構)、搭載モジュール(ロボットアーム部)、エンドエフェクターモジュール(先端工具)の4つのモジュールで構成されており、それぞれのモジュールを交換することで、様々な作業や現場環境に対応できるようになっています。
荷揚げモジュールは5段伸縮式になっており、8mの高さで150kg以上の荷揚げ能力があります。ロボットアーム部は、人の腕と同じように7つの関節により作業に高い自由度を持たせています。
小回りが利くように台車は4輪駆動・4輪操舵方式を採用しており、その場で回転する「超信地旋回」や真横への移動などができます。時速6kmで素早く移動できるほか、15度の斜面も登坂走行できる力強さがあります。さらに悪路にはクローラー式のモジュールに交換することで対応できる仕組みです。
動力源はリチウムイオン二次電池を使用し、連続5時間の稼働が可能です。遠隔操作には標準的なイーサネットを使っています。
 |
 |
|
15度の斜面走行(左)や真横への移動(右)も可能 |
|
 |
|
| 各部のモジュールを交換して、様々な作業や現場条件に対応できるマシンへと変身する | |
遠隔操作の高所作業車というと、気になるのが転倒事故です。その点については、二重の転倒防止機能が用意されており、万全を期しています。
まずはロボット操作により時々刻々と変化する姿勢に対して、
リアルタイムで重心位置
を計算し、車体から張り出すアウトリガーの支持範囲から重心が外れそうになったときは操縦者にアラームを発信することです。
さらに4つのアウトリガー先端には、荷重センサーが付いており、浮き上がる前に作業を停止するようになっています。
 |
|
操作画面にはアウトリガー先端の荷重値や重心位置などが表示される |
三菱重工は各モジュールを接続するための駆動電力や通信、油圧などの関連情報をすべて公開、他社にもモジュールの開発を呼びかけています。
三菱重工自体も、折りたたみ式やパンタグラフ式の荷揚げモジュール、せん断破壊作業を行うウォールクラッシャーや荷揚げ用デッキ・バケットなどの開発を検討しています。
さらに溶接やドリル、ハンド、漏えい検知などの各種用途向けの先端工具や、段差などに強いクローラー式台車モジュールなどの開発を行い、さらに高機能な遠隔作業ロボットへと進化させていく予定です。