



大成ロテック、東京大学生産技術研究所、エム・ソフトからなるコンソーシアムは、iPhoneやiPadのLiDAR機能を使って、電線共同溝の施工管理を自動化することに取り組んでいる。施工現場を1人で点群計測し、掘削幅や深さ、管路の埋設深さなどを自動抽出。設計BIM/CIMモデルと比較することで、リアルタイムに近い時間で出来形評価を行うものだ。これにより従来、数人がかりで行っていたメジャー計測や手入力による出来形書類の作成に比べて生産性は大幅に向上した。開発したシステムは今後、機能を拡張し、製品化される予定だ。
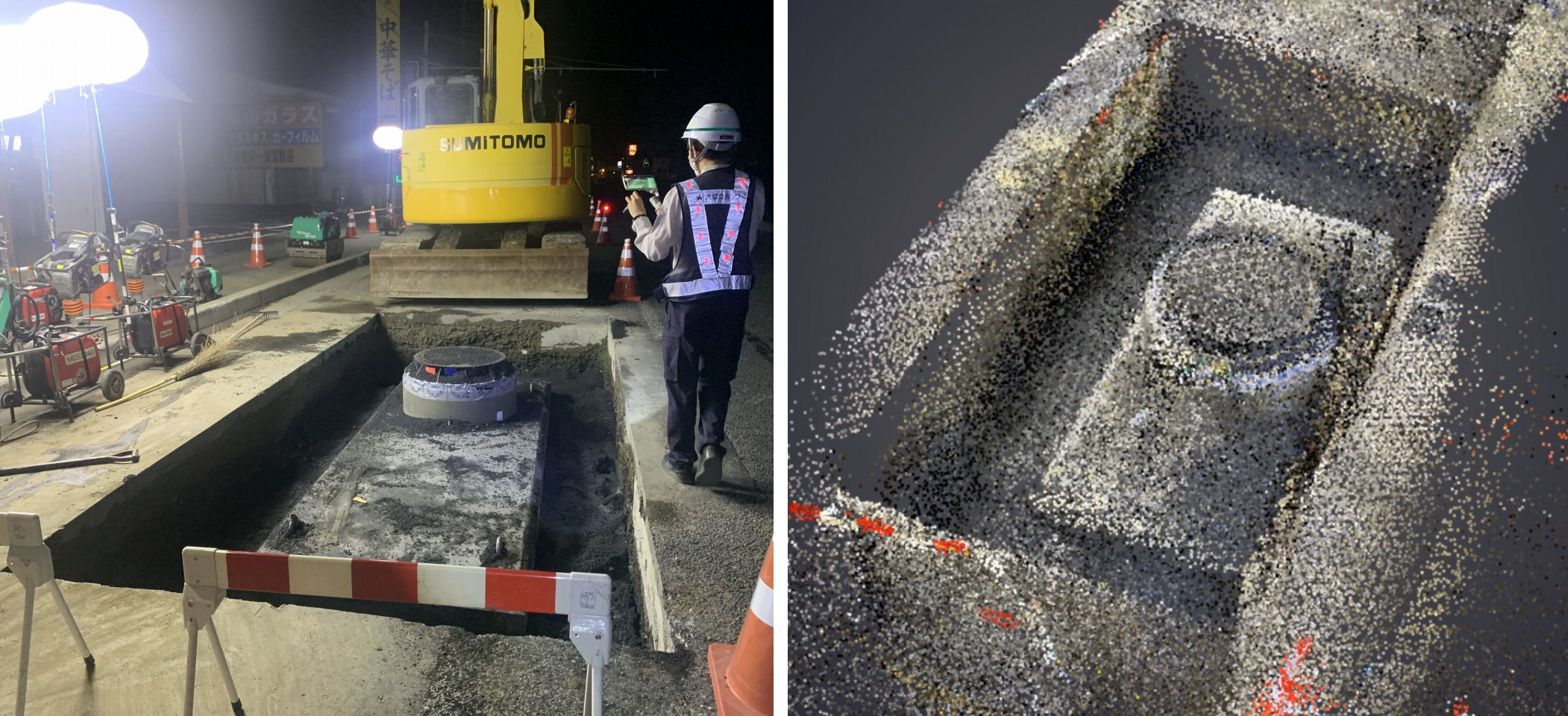
電線共同溝の管路部を埋設後、掘削部分をiPhoneのLiDAR機能で点群計測する施工管理者(左)。すると公共座標系で現場全体の点群データ(右)が作成され、様々な施工管理用データが抽出される
 人海戦術による計測作業を1人で
人海戦術による計測作業を1人で
全国で道路の無電柱化が進んでいる。無電柱化に欠かせないのが、様々な電力、通信などのケーブルを地中に移設するための電線共同溝の工事だ。
工事は一般的に夜間に行われ、15~20mの区間を掘削し、電線管や「CC-Box」と呼ばれるプレキャストコンクリート製のマンホール部を設置し、埋め戻していく。
「電線共同溝工事は工程が複雑なうえ、各工程の終わりには、出来形管理や施工数量の把握のため、作業をストップして各部の寸法計測や出来形写真の撮影を行う必要があるので、大変な手間ひまがかかっています」と、大成ロテック技術部技術推進室長の寺﨑真理氏は語る。

電線共同溝の施工現場
そこで大成ロテック、東京大学、エム・ソフトからなるコンソーシアム(企業連合)は2022年度、この施工管理作業を自動化するため、iPhoneやiPadのLiDAR(ライダー)と呼ばれる点群計測機能を活用し、現場計測作業の自動化に取り組んだ。
その名も「電線共同溝工事における出来形評価および施工数量確認システム」(以下、新システム)だ。
新システムの開発によって、従来は2~4名で行っていた各部の寸法計測が、iPhoneを持って施工範囲の周囲をぐるりと一周するだけで完了する上に、施工の出来形評価が1工程10分程度の時間で確認できるようになったのだ。

工程ごとに2~4名でメジャーを持って、各部の寸法を計測している。1回の計測時間は写真撮影や準備も含め10~15分程度

1人でiPhoneを持って掘削した溝の周囲を歩き、点群計測する。1工程の計測所要時間はわずか3分程度
ドローン用のGNSSマーカーで公共座標に
茨城県水戸市内を通る国道6号で、2022年度に大成ロテックが施工した、国土交通省関東地方整備局発注の「R3国道6号住吉町電線共同溝工事」では、新システムを使った施工管理の検証が行われた。
点群計測は、施工範囲にiPhoneを向けて、ぐるりと1周して計測する。
「1周する理由は、溝の内部を左右から点群計測するためです。すると死角がなくなるので、溝の内部を完全に点群化できます」と大成ロテック技術部技術推進室
係長の池田直輝氏は説明する。
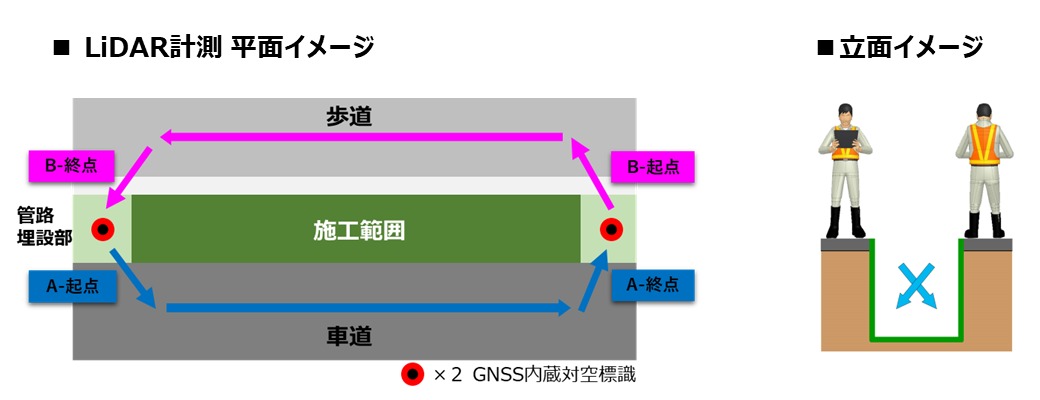
iPhone/iPadのLiDAR機能による点群計測の手順。施工範囲の両端にGNSS内蔵のマーカーを置き、これらを起点/終点として2回計測する(左)。掘削範囲を1周して計測することで、溝の内部を死角なく点群データ化できる(右)
点群計測に必要な機器は、LiDAR機能付きのiPhoneまたはiPadと、GNSS(全地球測位システム)内蔵の対空標識「エアロボマーカー」、そして対空標識上に貼り付けるARマーカーだけだ。また2022年度は、LiDAR計測による点群データの信頼度を確認するため、定点で簡易に計測ができるLeicaのBLK360とのデータ精度の比較も試みた。

点群計測に必要な機器
エアロボマーカーはGNSS受信機を備えており、現場に設置すると約1時間で公共座標による正確な位置を計測できる。通常は、ドローン(無人機)による地盤面の航空測量用に標定点などに活用されるものだ。
ARマーカーを貼りつけたエアロボマーカーは、施工範囲の両端に1つずつ置いておき、点群計測の起点と終点として写し込んでおく。
後で各マーカーの座標値を、ARマーカー中心座標として入力することで、点群データ全体が公共座標系に変換される仕組みだ。
LiDAR計測による点群データの精度
座標を付与したLiDAR計測データを用いて施工の合否判定を行うシステムだが、気になるのは取得される点群データの精度だ。
今回の試行ではBLK360による点群データを正として面データを作成し、LiDARによる点群データとの標高較差について比較を行った。その結果、ICT土工の面管理における規格値を十分に満足する結果となった。
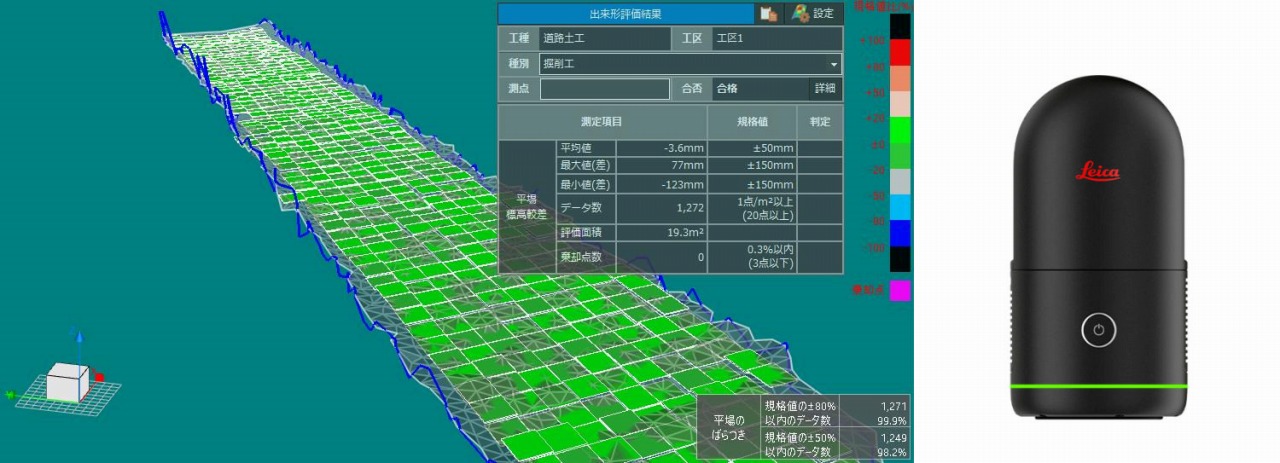
評価結果はICT土工の規格値を十分に満たしていた(左)。ライカ・ジオシステムズの3Dレーザースキャナー「BLK360」(右)との比較でデータ精度の確認を行った
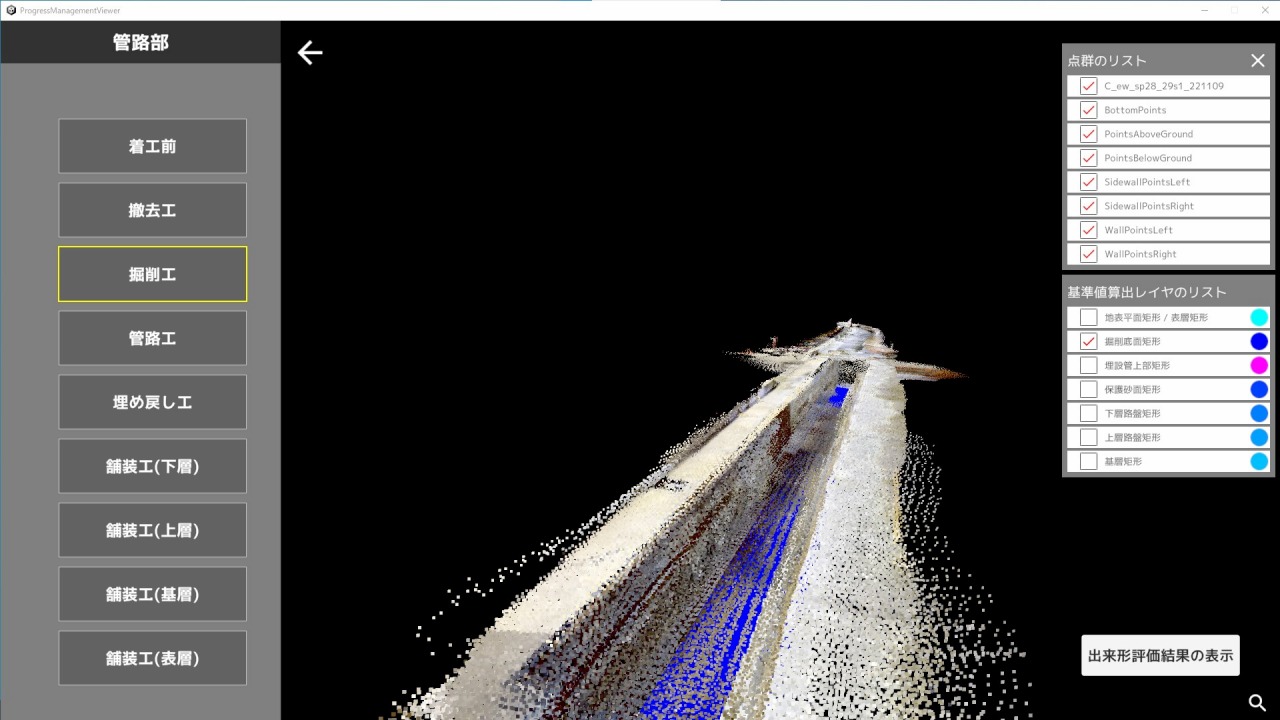
点群計測は1回の施工中に、(1)着工前、(2)舗装撤去後、(3)掘削後、(4)管路やCC-Box設置後、(5)埋め戻し後、(6)下層路盤後、(7)上層路盤後、(8)基層後、(9)表層後の9段階で行う。
その点群データを東京大学生産技術研究所の水谷司准教授が独自に開発したアルゴリズムで解析し、舗装撤去の面積、掘削幅や深さ、体積、管の埋設深さや延長など、出来形の合否判定および出来高算出に必要な部分を自動抽出する。
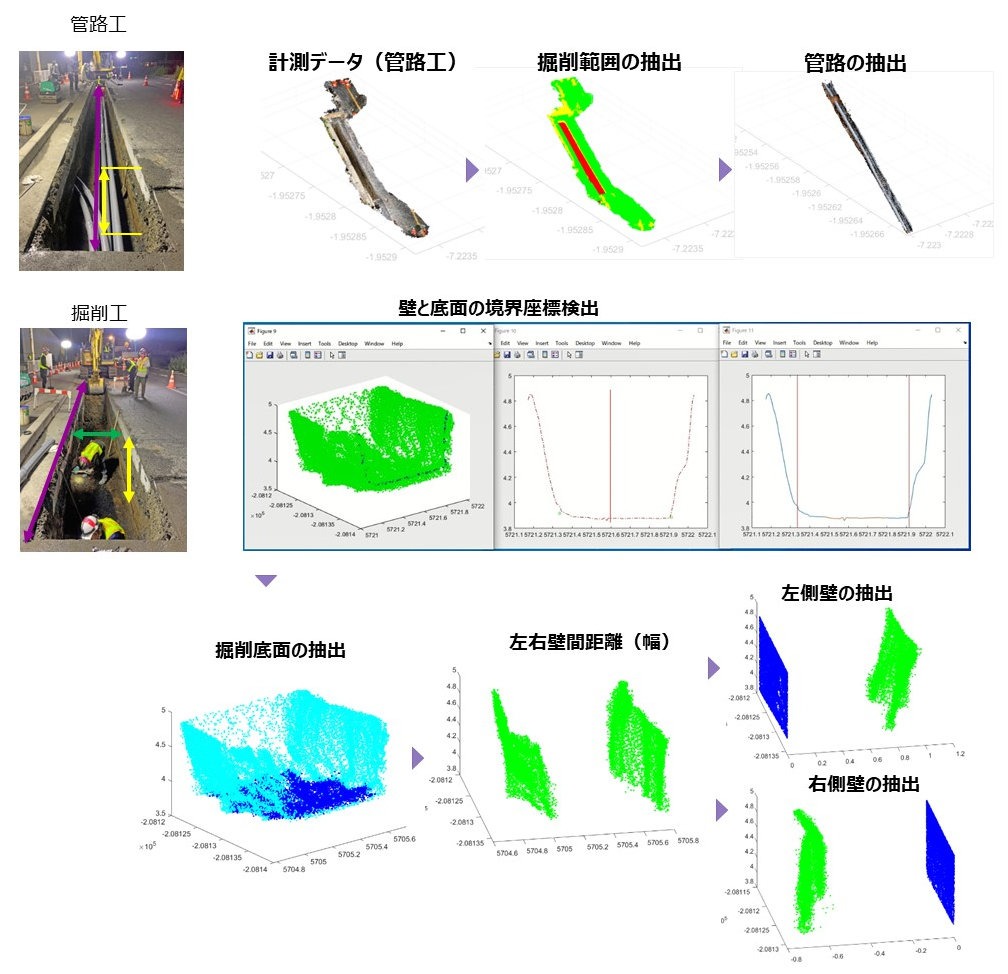
施工の各段階で計測した点群データをアルゴリズムで解析し、舗装撤去の面積や掘削幅、深さなど工種ごとに10種類以上のデータを自動抽出する
「こうして得られた出来形データは、エム・ソフトが開発したソフトで管理基準値となるBIM/CIMモデルと比較し、合否判定結果を表示するとともに、出来形データから舗装撤去や掘削、埋め戻しなどの出来高数量も算出します」と、エム・ソフト サービス事業推進室係長の大屋拓馬氏は説明する。
人海戦術でメジャーやスケールを使って計測していた作業は、点群とソフトウエアで置き換えることができるようになった。同時に、アナログ機器を目視で読み取り、紙に記入し、紙からパソコンへ手入力する手間や時間もなくなり、システム内で瞬時に出来形や出来高を数値データとして得られるようになった。ヒューマンエラーのリスクも大幅に減ったのだ。
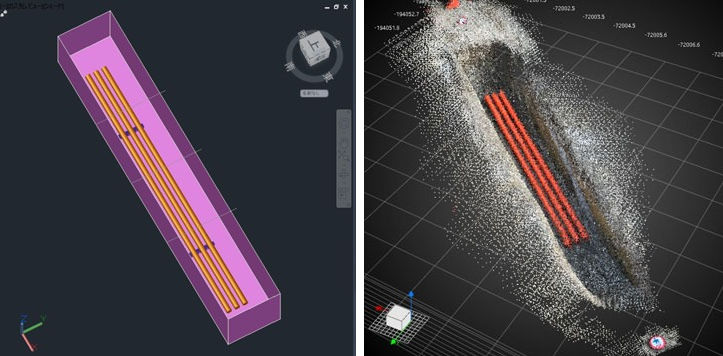
電線共同溝のBIM/CIMモデル(左)と点群データ(右)を比較して、施工の合否を判定する
BIM/CIMモデル上に表示した管路の点群データ

埋設深などの計測結果
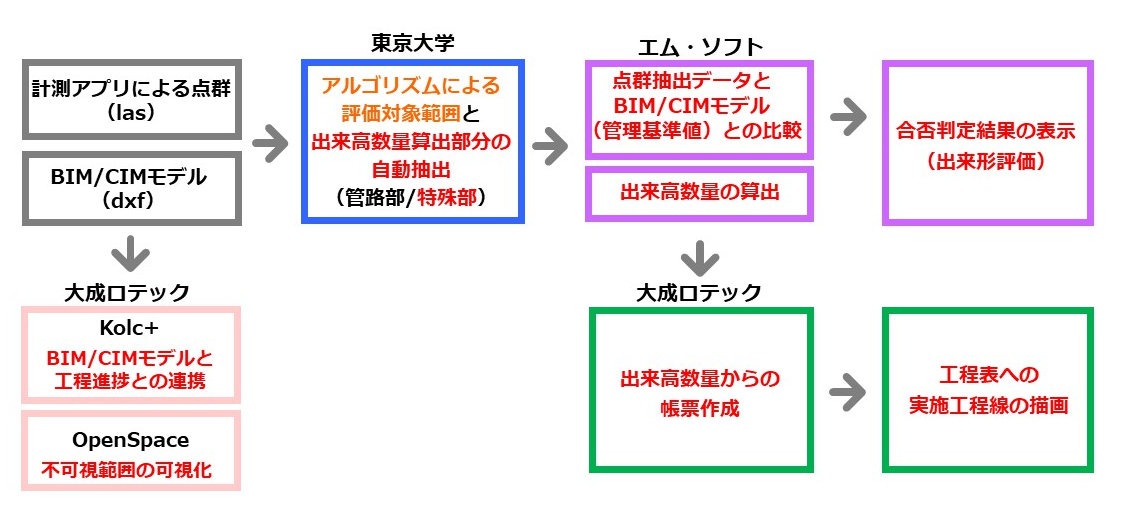
コンソーシアム各メンバーの分担。これまで手作業で計測、入力していた出来形データや出来高データは、システム内で自動処理できるようになり、ヒューマンエラーのリスクも大幅に減った
今回の取り組みは、今後の建設生産システムの効率化を大きく図る技術となるものであり、コンソーシアムメンバー皆が、三者三様に取り組んでいる。
特に今回のシステムの最重要機能である、施工記録の点群データから、出来形の評価や、出来高の特定を行う自動アルゴリズムの作成においては、リアルタイム空間解析学の権威である、東京大学生産技術研究所の水谷司准教授(東京大学卓越研究員)が担っている。
データの解析では、今後の発展性も踏まえて、建設業の専門知識を持たない客観的な考えのもとで、データ解析を行えるアルゴリズムの構築に取り組んだ。
また、エム・ソフトは、映像処理の専門企業として、取組当初からタブレット端末での計測アプリの開発や、取得したデータをアルゴリズムと連携させ、得られた結果を適切に評価するシステムの開発に取り組んだ。
大成ロテックは、コンソーシアムの取りまとめをはじめ、国土交通省との窓口や試行現場との調整などを行うとともに、計測データから必要範囲が抽出された点群を活用した工程表への実施工程線の自動描画および出来高帳票を作成するシステムを開発した。
このほか、360度画像データ管理プラットフォーム「OpenSpace」を使ってクラウド上に360°写真やBIM/CIMデータを共有するほか、BIM/CIM共有クラウド「KOLC+」上での工程管理や出来形管理の自動化を図った。
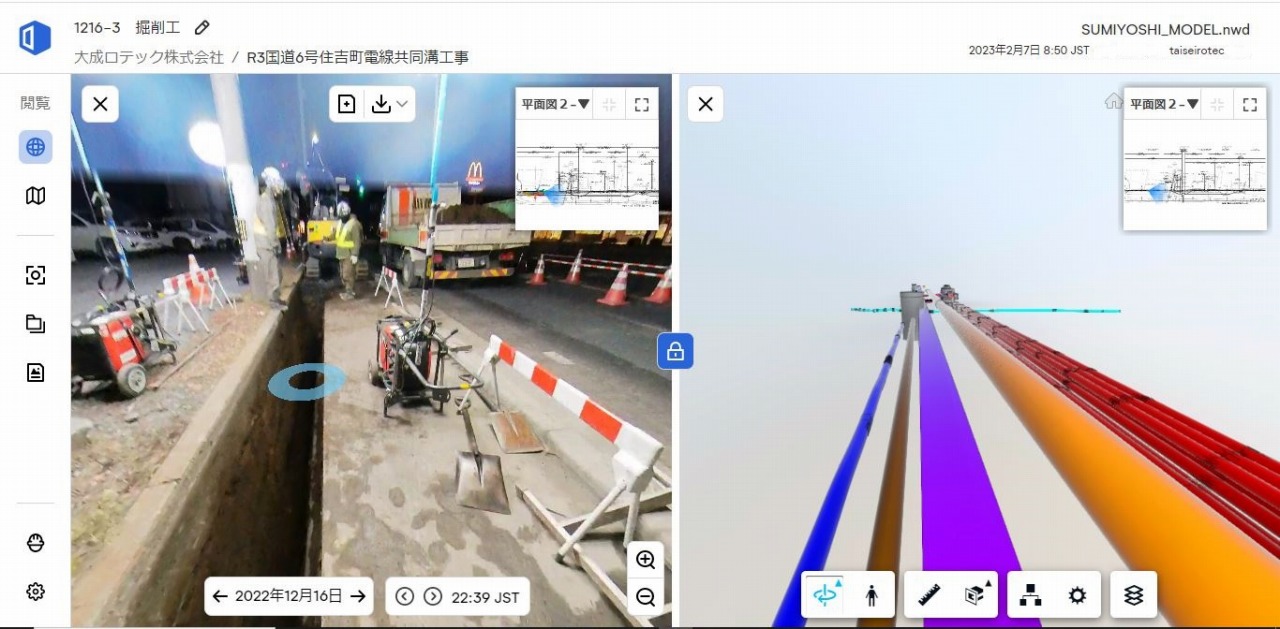
360°画像データ管理プラットフォーム「OpenSpace」による施工現場の360°写真やBIM/CIMモデルを共有し、進ちょく状況が遠隔地からでもわかるようにした
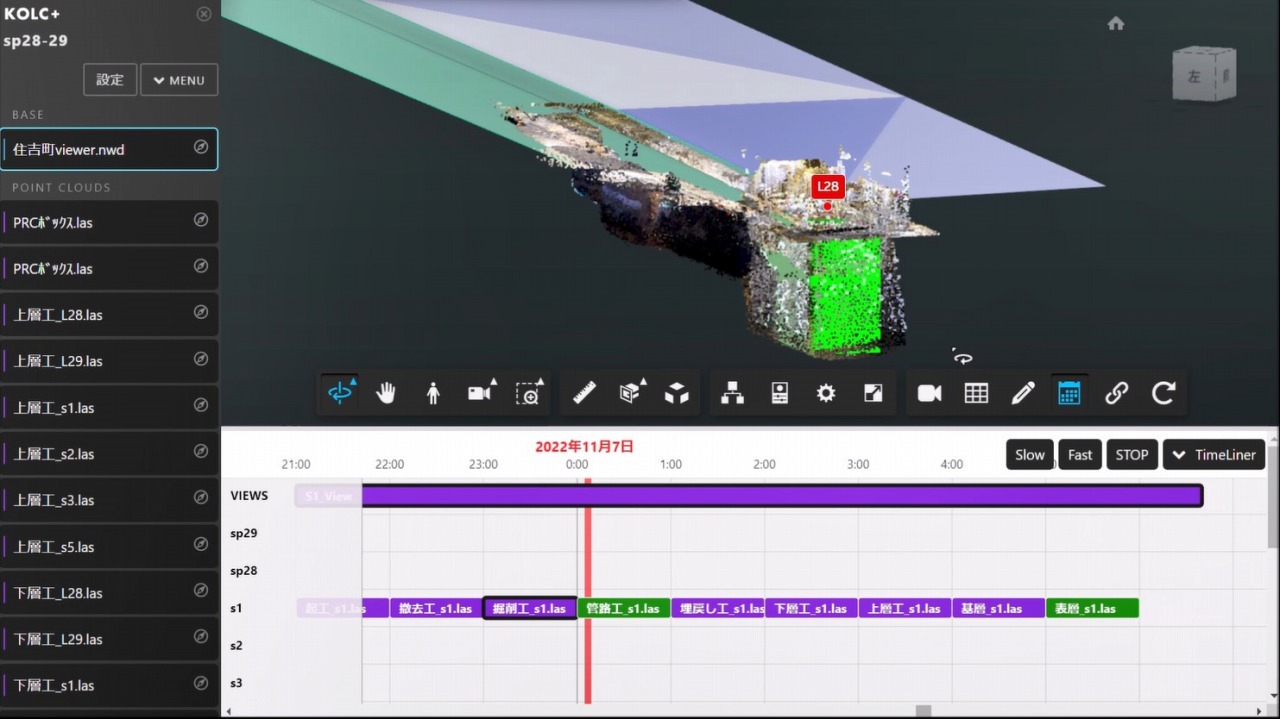
BIM/CIM共有クラウド「KOLC+」を活用し、点群を時系列的に表示・共有
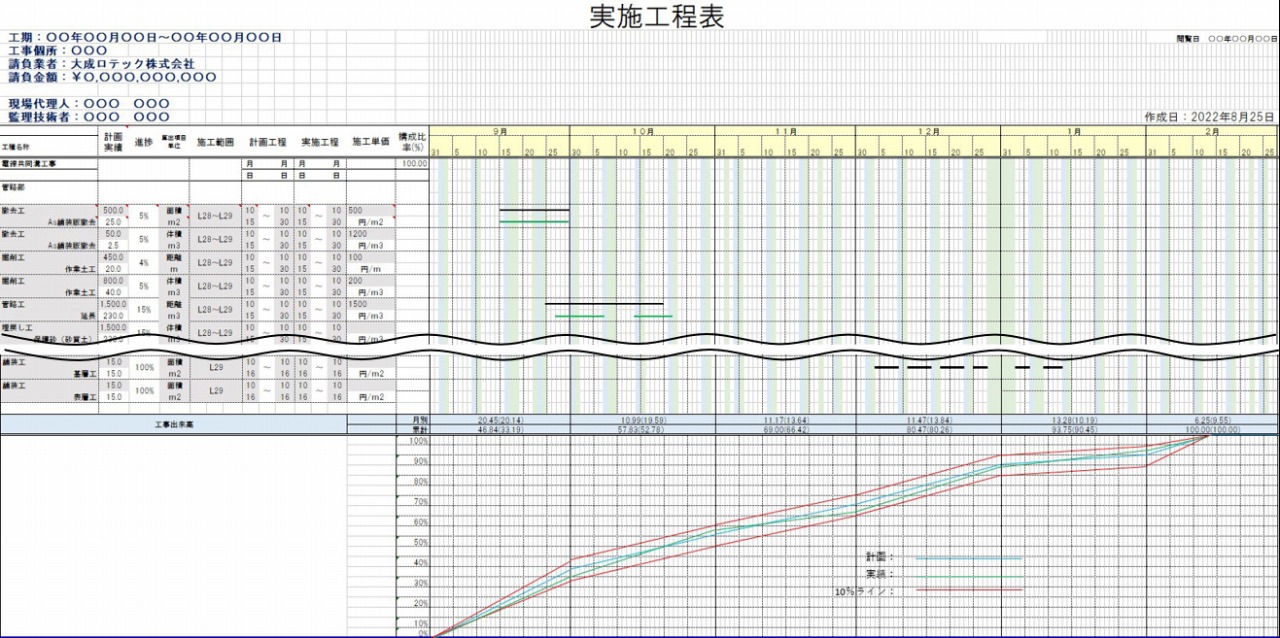
工程表に実施工程線を自動描画するシステムも開発した
3カ年のPRISMプロジェクトから製品化へ
今回のプロジェクトは、国交省が2022年度に実施した「建設現場の生産性を飛躍的に向上するための革新的技術の導入・活用に関するプロジェクト」(官民研究開発投資拡大プログラム:PRISM)の一環として、大成ロテック、東京大学、エム・ソフトがコンソーシアムを組んで取り組んでいるものだ。2020年度から採択され、3年目を迎えた。
1年目となる2020年度は、従来、外注業者にて無人航空機(UAV)や地上型レーザースキャナー(TLS)でのデータ取得が一般的であったICT施工管理手法の、計測コスト低減と計測人員を削減する観点から、手軽なタブレット端末で点群を計測することを目的に、新たなアプリの開発を行った。
当時はLiDAR機能を搭載したiPhone 12 ProやiPad Proが発売された直後で、建設業界のユーザーも極めて少なかった。しかし、同コンソーシアムではその可能性にいち早く気づき、電線共同溝という最適な工種で生産性向上に生かす取り組みを始めたのだった。
そして2年目は、電線共同溝の管路部に焦点を置き、掘削溝に設置した管を、点群から抽出し、溝の形状や管の深さと施工量を把握するアルゴリズムの開発。
3年目となる本年度はCC-Boxと呼ばれるマンホール付き特殊部の抽出まで機能を拡張していった。これによって、電線共同溝に関する出来形管理や出来高数量、工程管理に関するシステムはほぼ完成した。
同コンソーシアムでは電線共同溝や下水道など一部の工事に関するシステムに関して、パッケージソフト化し、2023年度中に製品としてリリースすることを目指している。また、今後は点群からの認識対象を、函渠、側溝や縁石、さらには個体物に広げて、建設現場の汎用構造物の評価にも取り組むこととしている。
さらに工程管理や積算のソフト開発企業とも連携を協議しており、工程管理の自動化や毎月の出来高調書の作成を自動化することを目指している。その成果は、2025年度にも製品としてリリースする予定だ。

当日、取材に応じたコンソーシアムのメンバー。左からエム・ソフト サービス事業推進室 係長 大屋拓馬氏、同・クラウドシステム部 山口大志氏、同・サービス事業推進室 部長 宗宮優一氏、大成ロテック 技術部技術推進室長 寺﨑真理氏、同・技術推進室 係長 池田直輝氏。円内は取材に参加できなかった東京大学生産技術研究所の水谷司准教授(東京大学卓越研究員)(左)と、大成ロテック技術部長の山田敏広氏(右)
| 【問い合わせ】 |
| 大成ロテック株式会社 〒160-6112 東京都新宿区西新宿8-17-1 住友不動産新宿グランドタワー TEL 03-5925-9437 FAX 03-3362-5808 WEBサイト https://www.taiseirotec.co.jp/ 東京大学生産技術研究所 水谷司 研究室 株式会社エム・ソフト |


