



実際に車いすに座り、車いす自体は動かさずに、モニターまたはヘッドマウントディスプレイ(HMD)を通してVR空間を走行できます。運転者の運転技術の評価も可能です。
現在、UC-win/Roadは、陸・海・空で動く乗り物をシミュレーションしています。シミュレーションの動作は入力機器(ジョイスティックやハンドルコントローラーなど)を使って制御するか、もしくは事前に定義した三次元経路(飛行経路)に基づきます。
今回、車いすをシミュレーションするため、UC-win/Roadの車両シミュレーション機能を拡張し車いすのスロープや段差のある地面(歩道や道路を含む)を自由に運転し、小さな段差や障害物を乗り越えられるようにしました(例:道路から歩道への乗り上げ)。
さらに、シミュレートされた車いすは、キーボード、ゲームパッド、または実際の車いす(図: WHILL Model CR)に座り車いす上のジョイスティックを使うことで、VR上のモデルを運転することが可能です(システム概要図参照)。
シミュレーションの終了時にはシミュレーション結果(シミュレーション経過時間、走行距離等)とシミュレーション中の記録(車いすの位置やジョイスティックのデータ等)を集約したテキストファイルが作成され、さらなる分析(運転評価)に活用することができます。

▲WHILL Model CR
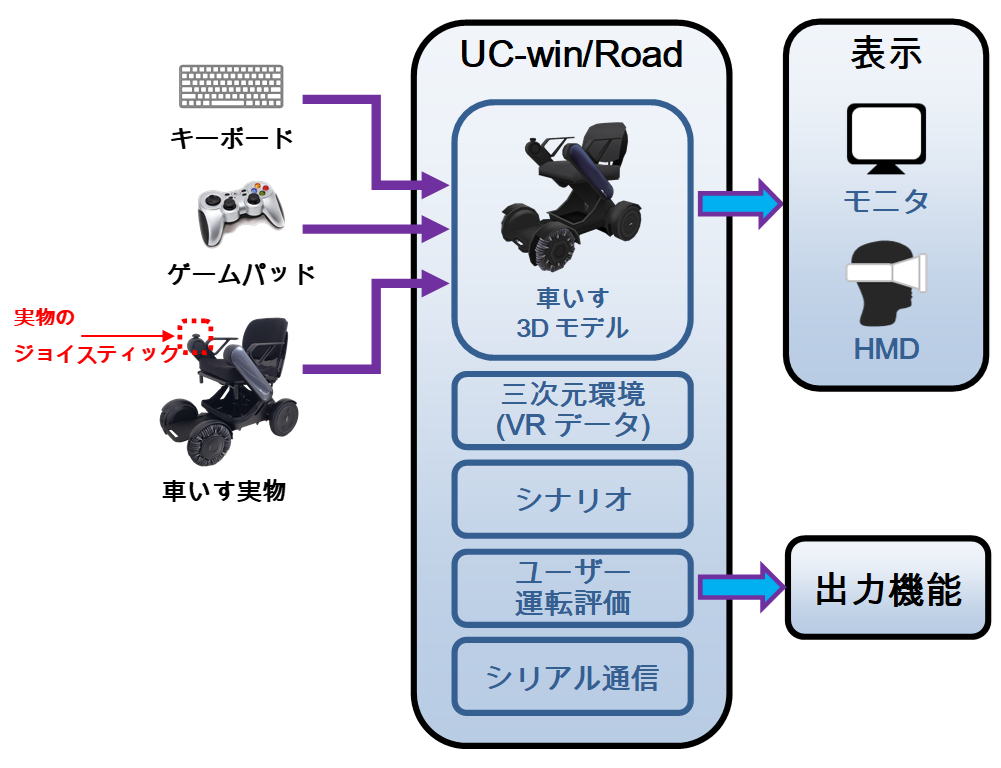
▲システム概要
関連情報
- ◆新製品情報
- 車いすシミュレータ(Up&Comming’21 春の号掲載)
カスタマイズシステム:車いすシミュレータ(関西大学システム理工学部 機械工学科)
関西大学システム理工学部 機械工学科 倉田准教授の研究開発成果である車いすシミュレータの映像表示部分に、UC-win/RoadのVR環境が利用されています。
車いすシミュレータハードウェア本体に両輪別駆動のトルクセンサー付き車輪を実装して算出した車速、路面抵抗のモデルを車いすの運動モデル(ダイナミクス)として使用。表示部分にはUC-win/Roadを活用。また、車いすシミュレータからの実測値のデータをUC-win/Roadに読み込むことで、VR空間内を移動可能であるかについて検証を実施します。
個人の障害の程度や部位を考慮し、これからの電動車いすのあるべき姿と、車いす利用時の事故発生の危険性を認知して、より安全な利用が可能となるシステムです。

▲車いすシミュレータ構成イメージ

▲ハードウェア連携部分構成図、フロー



