




ノミネート作品決定
クラウド審査の結果、ノミネート作品が決定しました!11月14日(木)デザインフェスティバル2024 Day2にて、最終審査・表彰式が行われます。
-
エントリーNo.16 MSN
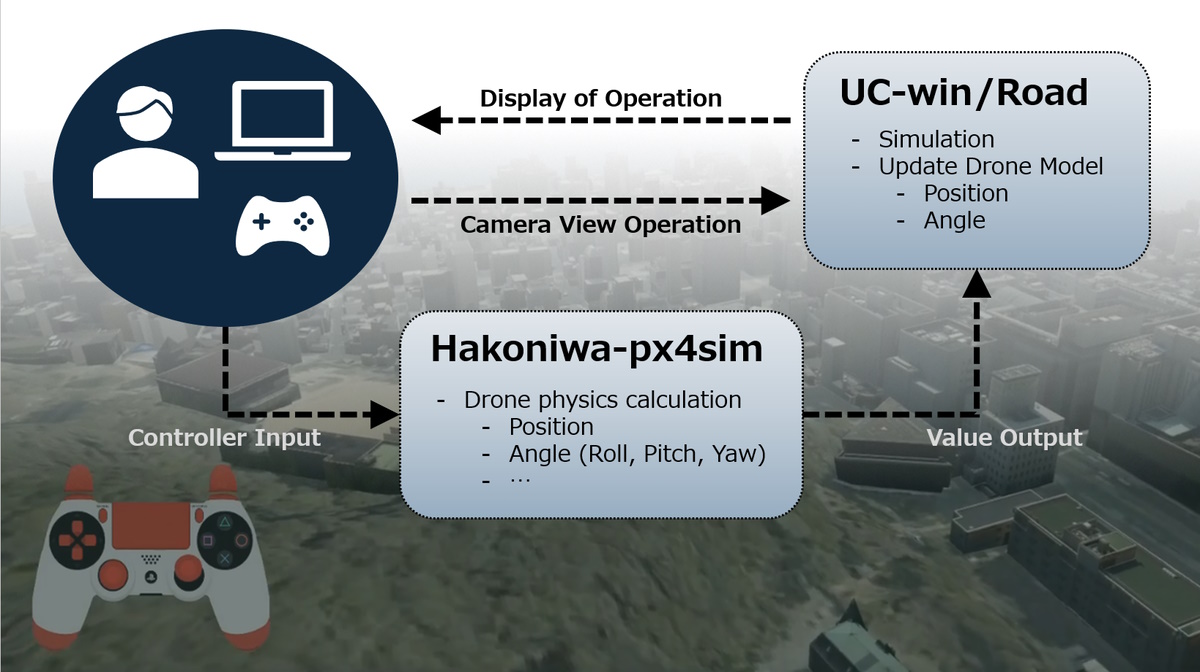
Hako-drone flight in VR city
- 本プロジェクトではオープンソース技術を利用して「Hako-drone flight in VR city (VR都市空間で飛行するハコドローン)」というシミュレーションシステムを作成します。
これを通じて、ユーザーはリアルなVR環境でドローンを操作できるなり、安全且つ制御された空間で練習や実験を行うことができます。シミュレーションのコアはオープンソースプロジェクトに基づいており、ドローンの挙動は物理ベースの高精度なモデルで表現されています。また、通常公式の登録や承認が必要な地域での飛行をシミュレーションできるというユニークなアドバンテージをユーザに提供し、制限のないトレーニングとテストを行うことが実現できます。 -
-
- 本プロジェクトではオープンソース技術を利用して「Hako-drone flight in VR city (VR都市空間で飛行するハコドローン)」というシミュレーションシステムを作成します。

-
エントリーNo.18 Pathfinder
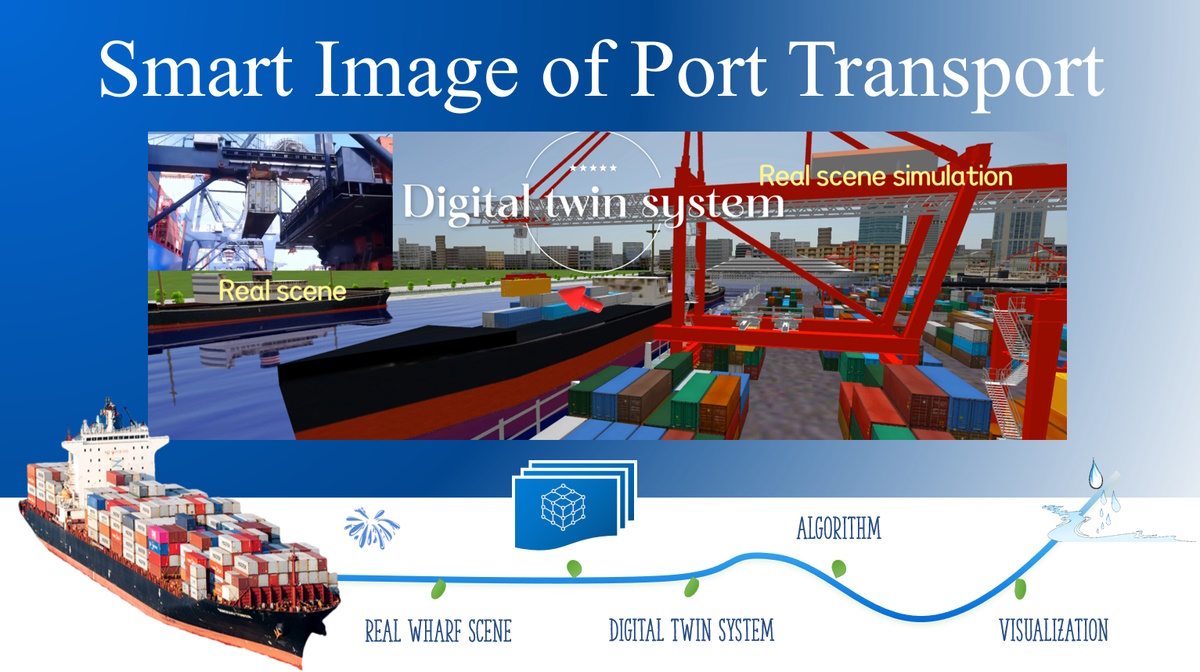
Smart Image of Port Transport
- 私たちのプロジェクト「Smart Image of Port Transport (港湾運送のスマートイメージ)」は、実際のシナリオとセンサーを使用して、港の輸送プロセスのデジタルツインを実現します。主な特徴としては、コンテナの積み込みの正確なシミュレーション、トラックのスケジューリングの自動管理、積み込み・積み下ろし作業や機器のステータスのリアルタイムモニタリング、潜在的な問題のインテリジェントな予測と最適なソリューションを提供する機能等があります。私たちは、リアルタイム性と可視化に焦点を当て、システムが変化する輸送環境に適応できるようにしています。
-
-
- 私たちのプロジェクト「Smart Image of Port Transport (港湾運送のスマートイメージ)」は、実際のシナリオとセンサーを使用して、港の輸送プロセスのデジタルツインを実現します。主な特徴としては、コンテナの積み込みの正確なシミュレーション、トラックのスケジューリングの自動管理、積み込み・積み下ろし作業や機器のステータスのリアルタイムモニタリング、潜在的な問題のインテリジェントな予測と最適なソリューションを提供する機能等があります。私たちは、リアルタイム性と可視化に焦点を当て、システムが変化する輸送環境に適応できるようにしています。
-
エントリーNo.19 Harmony Watch
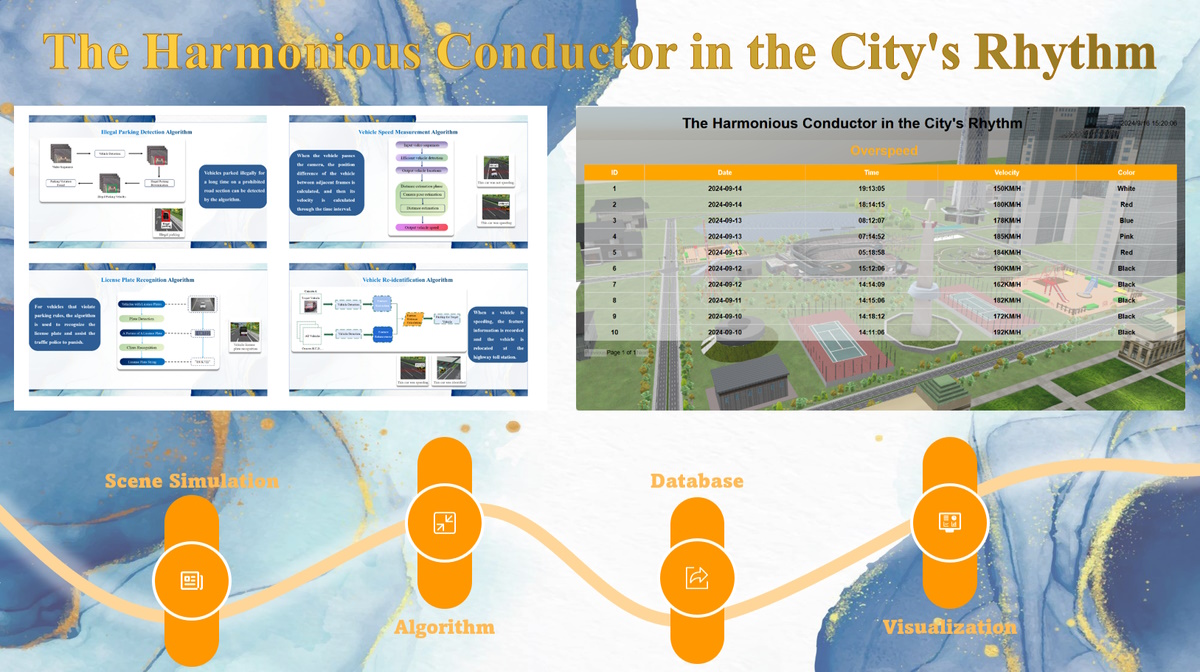
The Harmonious Conductor in the City’s Rhythm
- 私たちは最先端の機械学習アルゴリズムを活用し、高解像度カメラを通じて都市の交通流を把握・解析します。これにより、車両の速度をリアルタイムで監視し、安全運転を確保します。本システムのコアには、高精度なナンバープレート認識技術があり、規制を違反する車両の情報を迅速に特定・記録します。さらに、本システムは駐車禁止区域を賢く認識し、自動的に違法駐車の行為をマークします。システム全体のデザインはユーザーエクスペリエンスに重点を置き、直感的なインターフェースと簡単な操作を実現し、テクノロジーの力を使って都市の調和の取れた秩序を回復・維持することを目指しています。
-
-
- 私たちは最先端の機械学習アルゴリズムを活用し、高解像度カメラを通じて都市の交通流を把握・解析します。これにより、車両の速度をリアルタイムで監視し、安全運転を確保します。本システムのコアには、高精度なナンバープレート認識技術があり、規制を違反する車両の情報を迅速に特定・記録します。さらに、本システムは駐車禁止区域を賢く認識し、自動的に違法駐車の行為をマークします。システム全体のデザインはユーザーエクスペリエンスに重点を置き、直感的なインターフェースと簡単な操作を実現し、テクノロジーの力を使って都市の調和の取れた秩序を回復・維持することを目指しています。
-
エントリーNo.20 The Guardians
Smart Accident Response System (SARS)
- Smart Accident Response System(SARS)(スマート交通事故対応システム)は、リアルタイムの事故検出、即時の対応調整、そして高度な解析を通じて、道路の安全性と効率性を向上させるために設計された革新的なソリューションです。デジタルツインやメタバースの力を活用し、SARSは最先端の技術を統合して包括的な交通事故支援システムを提供します。これらの技術を活かすことで、SARSは即時の事故対応を改善するだけでなく、安全で効率的な道路の実現という長期的な目標にも貢献します。
-
-

- Smart Accident Response System(SARS)(スマート交通事故対応システム)は、リアルタイムの事故検出、即時の対応調整、そして高度な解析を通じて、道路の安全性と効率性を向上させるために設計された革新的なソリューションです。デジタルツインやメタバースの力を活用し、SARSは最先端の技術を統合して包括的な交通事故支援システムを提供します。これらの技術を活かすことで、SARSは即時の事故対応を改善するだけでなく、安全で効率的な道路の実現という長期的な目標にも貢献します。
-
エントリーNo.23 FutureSight Driver Monitor Squad
Driver distraction state recognition and risk warning system based on multi-source information fusion
- 現在、ドライバー状態モニタリングシステムは単一のデータソースに依存しており、疲労や視覚的な注意散漫は認識できても、認知的な注意散漫を認識することができません。本研究では、認知的および視覚的な注意散漫の状態の中での運転シミュレーション実験を行い、カメラや生理学的機器を使用して、頭の姿勢、視線の向き、心理生理学的な情報、運転行動などの多様なデータを収集します。運転の注意散漫の認識のための最適化された感度指標をRFEアルゴリズムを用いて作成し、Adamアルゴリズムで最適化されたBPニューラルネットワークモデルを開発します。このシステムは、マルチソース情報の融合に基づき、認知的および視覚的な注意散漫を91.43%の精度で正確に認識します。
-
-

- 現在、ドライバー状態モニタリングシステムは単一のデータソースに依存しており、疲労や視覚的な注意散漫は認識できても、認知的な注意散漫を認識することができません。本研究では、認知的および視覚的な注意散漫の状態の中での運転シミュレーション実験を行い、カメラや生理学的機器を使用して、頭の姿勢、視線の向き、心理生理学的な情報、運転行動などの多様なデータを収集します。運転の注意散漫の認識のための最適化された感度指標をRFEアルゴリズムを用いて作成し、Adamアルゴリズムで最適化されたBPニューラルネットワークモデルを開発します。このシステムは、マルチソース情報の融合に基づき、認知的および視覚的な注意散漫を91.43%の精度で正確に認識します。
-
エントリーNo.31 Shoot for the star
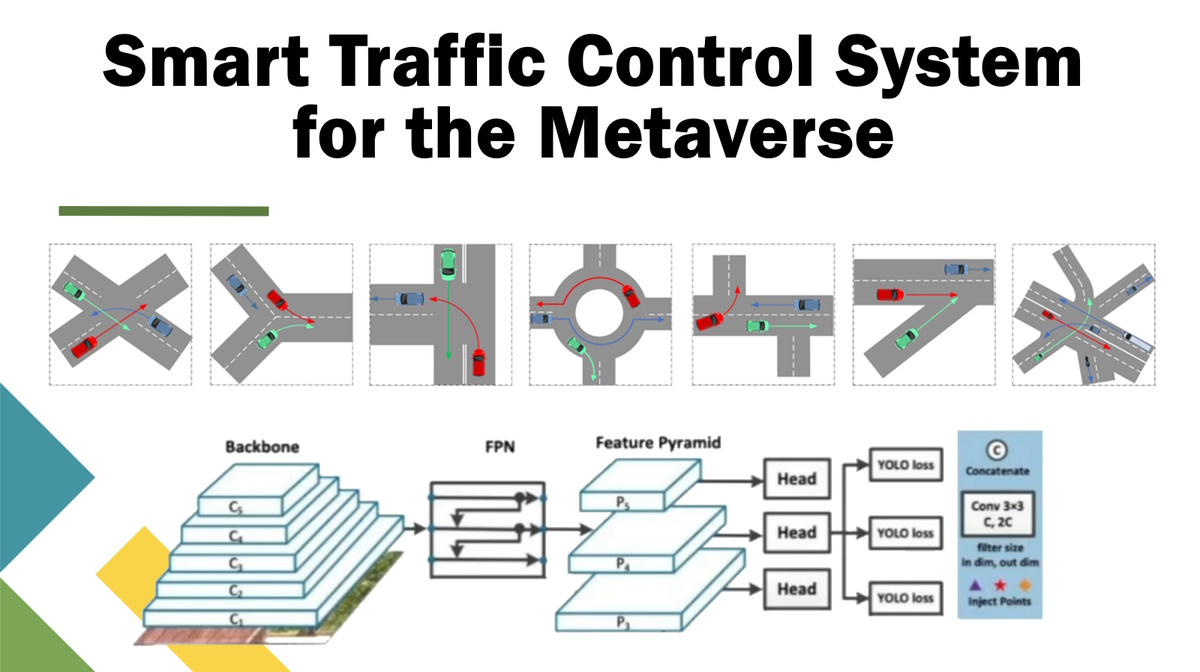
Smart Traffic Control System for the Metaverse
- 私たちのプロジェクトは、メタバース内の交通管理を革新することを目指して、交通信号を動的に調整し、ドライバーにリアルタイムでルート案内を提供するAIを活用したシステムを開発します。CCTVカメラからの交通パターンを解析するためにコンピュータビジョンアルゴリズムを活用し、交差点での信号のタイミングを最適化して混雑を最小限に抑え、交通流を改善します。同時に、車両のテレメトリーデータや高度なルーティングアルゴリズムを活用して、交通密度、道路状況、各車両の目的地などの要素を考慮しながら最適なルートを計算・提案します。このデータ駆動型のアプローチにより、より効率的で柔軟な交通システムが構築され、メタバース全体の体験が向上します。
-
-
- 私たちのプロジェクトは、メタバース内の交通管理を革新することを目指して、交通信号を動的に調整し、ドライバーにリアルタイムでルート案内を提供するAIを活用したシステムを開発します。CCTVカメラからの交通パターンを解析するためにコンピュータビジョンアルゴリズムを活用し、交差点での信号のタイミングを最適化して混雑を最小限に抑え、交通流を改善します。同時に、車両のテレメトリーデータや高度なルーティングアルゴリズムを活用して、交通密度、道路状況、各車両の目的地などの要素を考慮しながら最適なルートを計算・提案します。このデータ駆動型のアプローチにより、より効率的で柔軟な交通システムが構築され、メタバース全体の体験が向上します。
-
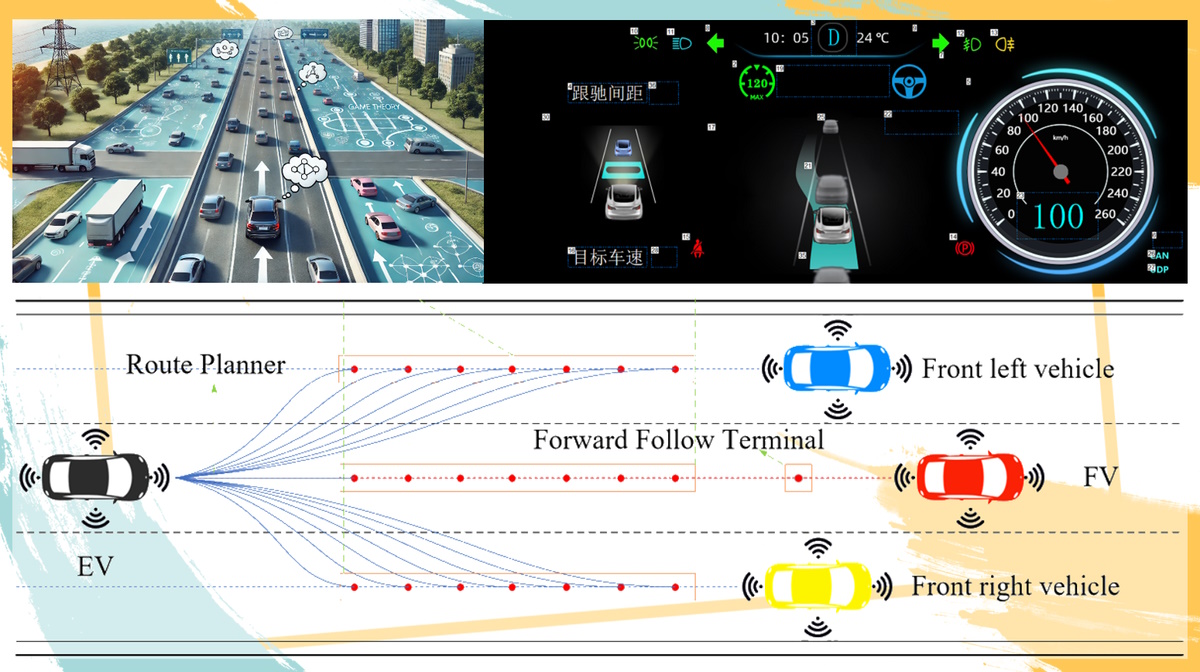
エントリーNo.36 Horizon
Autonomous driving and human-machine interaction systems for learning driving styles
- この研究は、UC-win/Road、自動運転、ヒューマン・コンピュータ・インタラクションなどのインターネット情報技術に基づいています。C++とユーザー定義プラグインを用いて、CAN、TCP、UDPネットワーク通信モジュール、ドライバーの運転スタイルを学習する学習モジュール、ゲーム理論に基づく意思決定モジュール、運転スタイルを考慮した計画モジュール、LQR + フィードフォワード制御を用いた水平制御モジュール、カスケードPIDを用いた垂直制御モジュールを開発します。また、LUAスクリプトに基づいたヒューマンマシンインターフェースを構築し、運転自動システムとヒューマンマシンインタラクションシステムを統合し、既存のドライビングシミュレータに基づいた自動運転シミュレーションプラットフォームを構築します。
-
-
- この研究は、UC-win/Road、自動運転、ヒューマン・コンピュータ・インタラクションなどのインターネット情報技術に基づいています。C++とユーザー定義プラグインを用いて、CAN、TCP、UDPネットワーク通信モジュール、ドライバーの運転スタイルを学習する学習モジュール、ゲーム理論に基づく意思決定モジュール、運転スタイルを考慮した計画モジュール、LQR + フィードフォワード制御を用いた水平制御モジュール、カスケードPIDを用いた垂直制御モジュールを開発します。また、LUAスクリプトに基づいたヒューマンマシンインターフェースを構築し、運転自動システムとヒューマンマシンインタラクションシステムを統合し、既存のドライビングシミュレータに基づいた自動運転シミュレーションプラットフォームを構築します。
-
エントリーNo.39 ASASOBI!
Privacy-preserving digital twin surveillance system
- 私たちのASASOBI privacy-preserving surveillance system (プライバシー保護監視システム)は、マルチモーダルLLMを活用して、デジタルツインを通じてシーンを観察します。センサーやカメラから取得したデータはローカルで処理され、マルチモーダルモデルによって匿名化され、UC-win/Roadのリアルタイムデジタルツインに表示するための重要な特徴が抽出されます。
ASASOBIは、処理されたデータのみを送信することで、個人のプライバシーを保護し、顔や衣服、身長といった身体的特徴や、性別、人種、年齢などの人口統計的情報の露出を防ぎます。このアプローチにより、システムは個人のプライバシーを損なうことなく、交通流や空間の解析といった重要な解析タスクを実行できるようになります。 -
-

- 私たちのASASOBI privacy-preserving surveillance system (プライバシー保護監視システム)は、マルチモーダルLLMを活用して、デジタルツインを通じてシーンを観察します。センサーやカメラから取得したデータはローカルで処理され、マルチモーダルモデルによって匿名化され、UC-win/Roadのリアルタイムデジタルツインに表示するための重要な特徴が抽出されます。
-
エントリーNo.46 KArina
Smarter Driving with LLM Assistance
- 本プロジェクトは、UC-win/Roadシミュレータと大規模言語モデル(LLM)を統合し、リアルタイムに運転洞察力を提供します。本システムは、継続的に受信データをモニタリング、および解析することにより、複雑なシナリオを理解し、リスクを評価し、ドライバーにコンテキストに応じたアドバイスを提供します。危険を予測し、危険を回避するためのアクションを提案することで、システムは情報に基づいた意思決定を支援し、運転の安全性を向上させます。目標は、人間の直感とAI駆動の解析をつなぎ、リアルタイムのフィードバックを通じてドライバーをサポートする環境を作り出し、安全で効率的な運転体験を実現することです。
-
-

- 本プロジェクトは、UC-win/Roadシミュレータと大規模言語モデル(LLM)を統合し、リアルタイムに運転洞察力を提供します。本システムは、継続的に受信データをモニタリング、および解析することにより、複雑なシナリオを理解し、リスクを評価し、ドライバーにコンテキストに応じたアドバイスを提供します。危険を予測し、危険を回避するためのアクションを提案することで、システムは情報に基づいた意思決定を支援し、運転の安全性を向上させます。目標は、人間の直感とAI駆動の解析をつなぎ、リアルタイムのフィードバックを通じてドライバーをサポートする環境を作り出し、安全で効率的な運転体験を実現することです。
ページの先頭へ
予選選考会結果発表
VR・クラウド・最新AI技術を駆使して、技術力と新規性のある作品を期待
7月10日にボストンのMIT ILPと東京オンライン会議で審査員による予選選考会が実施されました。国内外より多数の応募が集まり、過去最多の34チームのエントリーが決定しました。今後は作品制作・提出およびノミネート審査を経て、11月のデザインフェスティバル2024-3Daysで最終審査と表彰式が行われます。
各チームのプロジェクト目標が明確で、多数のチームで作戦まで良く練られていると見受けられました。予選選考会では審査員の意見交換を行い、各チームへのフィードバックを個別に行っております。VR、クラウドまた最新のAI技術などを駆使して各チームから、技術力と新規性のある作品を期待しております。

▲7月10日に行われた予選選考会の様子
審査員:左から福田知弘氏(審査委員長)、ペンクレアシュ・ヨアン氏、楢原 太郎 氏
詳しくは、フォーラムエイトのウェブサイトで。
(Visited 1 times, 1 visits today)


