







ノミネート作品決定
クラウド審査の結果、ノミネート作品が決定しました!11月20日(木)デザインフェスティバル2025 Day2にて、最終審査・表彰式が行われます。
-
エントリーNo.01 Intelligent mobility in all domains
Intelligent driving system for all-domain intelligent logistics and autonomous driving
- このプロジェクトでは、UC-win/Roadと連携した視覚言語モデル(Mini-InternVL2-DA-DriveLM)を使用して、トラック用のスマート物流自動運転システムを開発しています。3層アーキテクチャ(データ認識、VLM推論、制御実行)により、シーン理解が簡潔な自然言語による運転提案に変換され、さらにスロットル、ブレーキ、ステアリングのコマンドに変換されます。プロンプトエンジニアリング、COMベースのデータキャプチャ、リアルタイム意思決定ループを、控えめなハードウェア(RTX 4060 8GB)上で実装しました。DriveGPT4拡張データセットを用いた微調整により、高速道路、市街地道路、港湾における適応性、安全性、解釈性が向上します。シナリオテストでは、安全性、コンプライアンス、快適性、効率性を評価し、将来の実際の展開に向けたインテリジェントな無人貨物輸送への実現可能、説明可能、かつ費用対効果の高い道筋を示します。
-
-

- このプロジェクトでは、UC-win/Roadと連携した視覚言語モデル(Mini-InternVL2-DA-DriveLM)を使用して、トラック用のスマート物流自動運転システムを開発しています。3層アーキテクチャ(データ認識、VLM推論、制御実行)により、シーン理解が簡潔な自然言語による運転提案に変換され、さらにスロットル、ブレーキ、ステアリングのコマンドに変換されます。プロンプトエンジニアリング、COMベースのデータキャプチャ、リアルタイム意思決定ループを、控えめなハードウェア(RTX 4060 8GB)上で実装しました。DriveGPT4拡張データセットを用いた微調整により、高速道路、市街地道路、港湾における適応性、安全性、解釈性が向上します。シナリオテストでは、安全性、コンプライアンス、快適性、効率性を評価し、将来の実際の展開に向けたインテリジェントな無人貨物輸送への実現可能、説明可能、かつ費用対効果の高い道筋を示します。

-
エントリーNo.14 FlowPilot
BlueZone Smart Navigation Lock
- 本プロジェクトの目的は、高速3D再構築、リアルタイムの船舶追跡、危険貨物船の検出を統合し、船舶閘門の管理を強化するデジタルツインベースのスマートナビゲーション閘門システムの構築です。このシステムは、高速再構築アルゴリズムを使用して船舶のリアルな 3Dモデルを生成するとともに、YOLOv11ベースの追跡アルゴリズムとAIS情報を組み合わせることで、閘門通過中の船舶の正確なリアルタイムの位置を保証します。さらに、ResNetベースの分類モデルを採用して危険物を検出し、集中ディスプレイに視覚的な警告を表示します。
-
-

- 本プロジェクトの目的は、高速3D再構築、リアルタイムの船舶追跡、危険貨物船の検出を統合し、船舶閘門の管理を強化するデジタルツインベースのスマートナビゲーション閘門システムの構築です。このシステムは、高速再構築アルゴリズムを使用して船舶のリアルな 3Dモデルを生成するとともに、YOLOv11ベースの追跡アルゴリズムとAIS情報を組み合わせることで、閘門通過中の船舶の正確なリアルタイムの位置を保証します。さらに、ResNetベースの分類モデルを採用して危険物を検出し、集中ディスプレイに視覚的な警告を表示します。
-
エントリーNo.18 SafeFlow Innovators
Smart Gas Station
- YOLOv11とQwen2.5-VLを活用して、ガソリンスタンド向けのインテリジェントデジタルツインシステムを開発しました。リアルタイムの車両追跡と異常検知を行い、UC-win/Roadで同期された3D仮想レプリカを作成します。このシステムは、管理者には視覚的な監視と早期警告のプラットフォームを提供し、モバイルアプリではユーザーにリアルタイムの状態確認、予約、非接触型決済などのサービスを提供して、安全性の向上、運用効率の最適化、よりスマートな給油体験の実現を目指します。
-
-

- YOLOv11とQwen2.5-VLを活用して、ガソリンスタンド向けのインテリジェントデジタルツインシステムを開発しました。リアルタイムの車両追跡と異常検知を行い、UC-win/Roadで同期された3D仮想レプリカを作成します。このシステムは、管理者には視覚的な監視と早期警告のプラットフォームを提供し、モバイルアプリではユーザーにリアルタイムの状態確認、予約、非接触型決済などのサービスを提供して、安全性の向上、運用効率の最適化、よりスマートな給油体験の実現を目指します。
-
エントリーNo.19 Intelligent Driving Escort Team
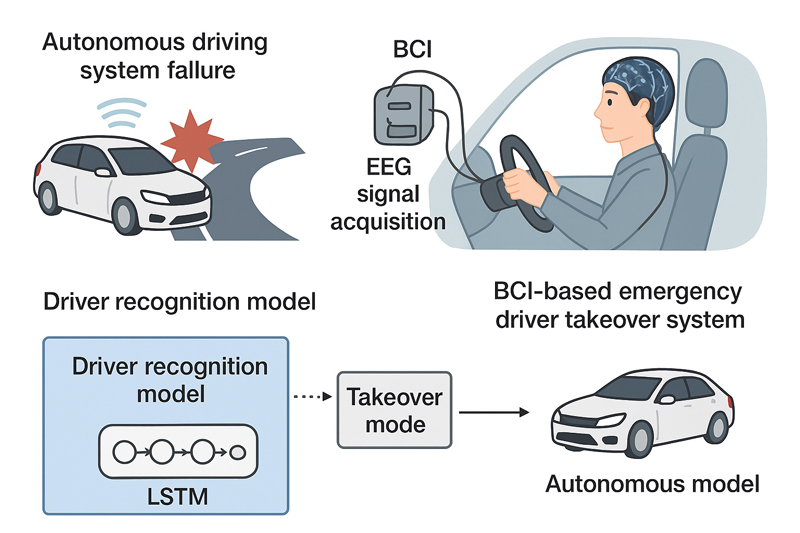
Brain control emergency takeover method and system for driver facing automatic driving failure
- このプロジェクトの研究内容は以下の通りです。
(1) 自動運転車のドライバー向けにカスタマイズされた脳波データ取得プラットフォームを構築し、リアルタイムの信号捕捉を実現します。
(2) 自動運転の故障を再現したシミュレーション環境を構築し、運転の引き継ぎシナリオを誘発します。
(3) 引き継ぎ前の脳波データセットを収集し、90%の精度で早期の意図認識を実現する機械学習アルゴリズムを開発します。
(4) 緊急車両制御のためのシームレスなソフトウェアとハードウェアの連携を可能にする統合型ブレインコンピュータインターフェースシステムを設計します。
-
-
- このプロジェクトの研究内容は以下の通りです。
-
エントリーNo.28 LeMotion Dynamics
FlowSync – Real-Time Urban Traffic Simulator
- FlowSyncは、UC-win/RoadとSDKのみを使用して構築された動的な都市交通シミュレーションプラットフォームです。このシミュレータは、ユーザーが仮想都市環境において交通流をモデル化し、テストし、最適化できるインタラクティブな環境を構築することを目的としています。交通パラメータをリアルタイムで変化させることで、日常的な渋滞から緊急事態まで、様々な条件下における多様な交通管理戦略の効果を実証することが可能です。
-
-
- FlowSyncは、UC-win/RoadとSDKのみを使用して構築された動的な都市交通シミュレーションプラットフォームです。このシミュレータは、ユーザーが仮想都市環境において交通流をモデル化し、テストし、最適化できるインタラクティブな環境を構築することを目的としています。交通パラメータをリアルタイムで変化させることで、日常的な渋滞から緊急事態まで、様々な条件下における多様な交通管理戦略の効果を実証することが可能です。
-
エントリーNo.29 WINter
PRISM(Pedestrian Risk Insight & Safety Matrix)
- UC-win/Roadシミュレータから受け取った位置情報をもとに、移動体の将来の位置を予測し、LSTM予測器を通じて衝突のリスクを判断するシステムです。予測結果はボクセル単位で解析され、重なり具合に応じてリスクを算出し、車両制御に反映されます。さらに、物体認識により子供など特定のクラスに重み付けすることでリスクを調整します。言語モデルがリスクを検知してドライバーに状況説明を行い、必要に応じて直接制御を行います。
-
-

- UC-win/Roadシミュレータから受け取った位置情報をもとに、移動体の将来の位置を予測し、LSTM予測器を通じて衝突のリスクを判断するシステムです。予測結果はボクセル単位で解析され、重なり具合に応じてリスクを算出し、車両制御に反映されます。さらに、物体認識により子供など特定のクラスに重み付けすることでリスクを調整します。言語モデルがリスクを検知してドライバーに状況説明を行い、必要に応じて直接制御を行います。
-
エントリーNo.31 Horizon
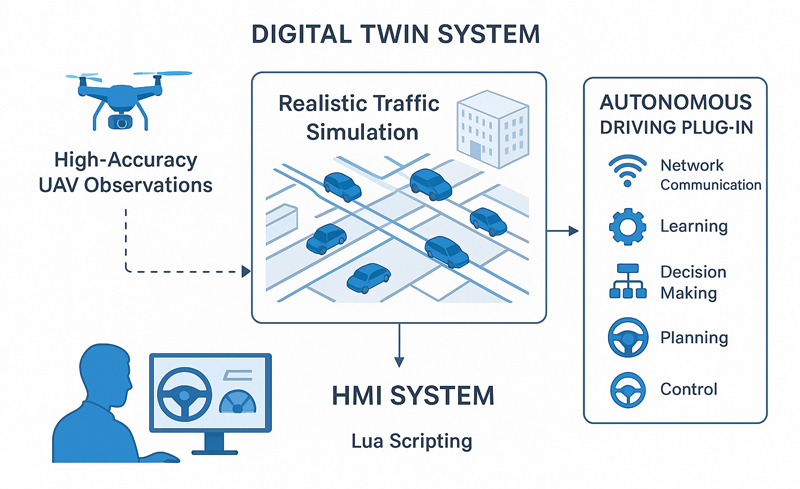
Precision-Driven Digital Twin System for Autonomous Vehicle Validation: Synthesizing High-Fidelity Geospatial and UAV-Derived Data
- このプロジェクトでは、UC-win/Roadをシミュレーションプラットフォームとして活用し、デジタルツインシステムの開発のために、自動運転とヒューマンマシンインターフェース(HMI)技術を統合しています。高精度な無人航空機(UAV)観測データにより、リアルな交通流シミュレーションが可能になります。道路固有のBIMと衛星画像を統合することでシーンの忠実度が向上します。さらに、ネットワーク通信、学習、意思決定、計画、制御を可能にする自動運転プラグインを、LUAスクリプトHMIシステムとともに開発し、次世代のデジタルツインフレームワークを構成しています。
-
-
- このプロジェクトでは、UC-win/Roadをシミュレーションプラットフォームとして活用し、デジタルツインシステムの開発のために、自動運転とヒューマンマシンインターフェース(HMI)技術を統合しています。高精度な無人航空機(UAV)観測データにより、リアルな交通流シミュレーションが可能になります。道路固有のBIMと衛星画像を統合することでシーンの忠実度が向上します。さらに、ネットワーク通信、学習、意思決定、計画、制御を可能にする自動運転プラグインを、LUAスクリプトHMIシステムとともに開発し、次世代のデジタルツインフレームワークを構成しています。
-
エントリーNo.35 Blooming
Smart Motion Drive for the Future Mobility
- Smart Motion Driveは、モーションキャプチャ技術と運転システムを統合することで、人と自動運転車の間に革新的な相互作用を実現します。体の6箇所に装着したソニーのmocopiセンサーにより、手を挙げるなどのユーザーの動きが車両の制御コマンドに変換されます。ジェスチャーで加速、旋回、停止が可能なセルフドライビングモードと、ユーザーが遠隔で車両を呼び出したり返却したりできるオートドライビングモードの2つのモードをサポートしています。UnityとPythonで実装されたこのシステムは、Web 4.0時代におけるインクルーシブで楽しいモビリティを促進し、デジタルと現実世界の交通体験を繋ぐことで高齢者や障がいのある方々を支援します。
-
-
- Smart Motion Driveは、モーションキャプチャ技術と運転システムを統合することで、人と自動運転車の間に革新的な相互作用を実現します。体の6箇所に装着したソニーのmocopiセンサーにより、手を挙げるなどのユーザーの動きが車両の制御コマンドに変換されます。ジェスチャーで加速、旋回、停止が可能なセルフドライビングモードと、ユーザーが遠隔で車両を呼び出したり返却したりできるオートドライビングモードの2つのモードをサポートしています。UnityとPythonで実装されたこのシステムは、Web 4.0時代におけるインクルーシブで楽しいモビリティを促進し、デジタルと現実世界の交通体験を繋ぐことで高齢者や障がいのある方々を支援します。
-
エントリーNo.39 AutoBump
Speed Bump Response System for Autonomous Driving
- 自動車業界が自動運転車や電気自動車へと移行するにつれ、路面障害物への対応ミスは、単なる不快感の問題ではなく重大な安全上の問題となっています。現在のシステムは、非リアルタイムのHDマップへの依存と、路面の詳細よりも動的な危険に偏った認識に重点が置かれているという制約があります。今回開発したシステムは、「認識→分類→制御→評価→調整」のシミュレータベースの自己学習ループによってこれらの制約を克服します。これにより、HDマップなしでリアルタイムの検知と対応が可能になり、安全性と効率性を確保しながらパフォーマンスを継続的に最適化します。
-
-

- 自動車業界が自動運転車や電気自動車へと移行するにつれ、路面障害物への対応ミスは、単なる不快感の問題ではなく重大な安全上の問題となっています。現在のシステムは、非リアルタイムのHDマップへの依存と、路面の詳細よりも動的な危険に偏った認識に重点が置かれているという制約があります。今回開発したシステムは、「認識→分類→制御→評価→調整」のシミュレータベースの自己学習ループによってこれらの制約を克服します。これにより、HDマップなしでリアルタイムの検知と対応が可能になり、安全性と効率性を確保しながらパフォーマンスを継続的に最適化します。
-
エントリーNo.43 STRL Team
Safe Driving Score: Measuring Human and AI Driving Performance in Virtual Simulations
- このプロジェクトは、UC-win/RoadとPythonベースのダッシュボードを統合して開発した、リアルタイムの安全運転スコア分析システムです。速度、加速度、ヨーレートなどの車両動的データをUDP経由で受信します。このアルゴリズムは、速度超過、急ブレーキ、急ハンドルなど、7種類の危険な運転行動を、公式の交通安全機関の基準に基づいて評価します。ドライバーのスコアは100点から始まり、危険な運転行動に対しては減点され、安全運転に対しては加点されます。スコアの変化はすべてリアルタイムのグラフに表示され、ドライバーに即時かつ客観的なフィードバックを提供します。
-
-

- このプロジェクトは、UC-win/RoadとPythonベースのダッシュボードを統合して開発した、リアルタイムの安全運転スコア分析システムです。速度、加速度、ヨーレートなどの車両動的データをUDP経由で受信します。このアルゴリズムは、速度超過、急ブレーキ、急ハンドルなど、7種類の危険な運転行動を、公式の交通安全機関の基準に基づいて評価します。ドライバーのスコアは100点から始まり、危険な運転行動に対しては減点され、安全運転に対しては加点されます。スコアの変化はすべてリアルタイムのグラフに表示され、ドライバーに即時かつ客観的なフィードバックを提供します。
ページの先頭へ
予選選考会結果発表
多岐に渡る分野の興味深い作品が多数、今後のブラッシュアップに期待
7月16日にローマと東京オンライン会議で審査員による予選選考会が実施されました。国内外より多数の応募が集まり、30チームの予選通過が決定しました。今後は作品制作・提出およびノミネート審査を経て、11月のデザインフェスティバル2025-3Daysで最終審査と表彰式が行われます。
これまでの交通シミュレーションに加えて、Repair、EEG、医療(ASD)、LLM、ROS2、Body language、Agricultureといった興味深いプロジェクトもありました。予選選考会では審査員の意見交換を行い、各チームへのフィードバックを個別に行っており、今後のブラッシュアップに期待しています。

▲7月16日に行われた予選選考会の様子
審査員:左から福田知弘氏(審査委員長)、楢原 太郎 氏、佐藤 誠 氏(モニター)、ペンクレアシュ・ヨアン氏
ポスターPDFダウンロード
テーマ:Web4.0時代を切り拓く次世代デジタル技術の創造
本コンテストは、UC-win/Road、VR-Cloud®、スイート千鳥エンジン®およびそのSDK(開発キット)、統合型3DCGソフトShade3DおよびそのSDKで開発を行ったアプリケーションプログラム、あるいはこれらと連携するプログラム・ソフトウェアを対象として、開発システムの内容を競います。
プログラミングのスキルとセンスを駆使して、システム開発、アプリケーション開発に挑戦してください。ご応募をお待ちしています。
【貸与対象ソフトウェア】
- ■UC-win/Road、UC-win/Road SDK(開発キット)
3DVRソフトUC-win/Roadおよびアプリやオプション作成を可能にするための開発キット。新たにPythonによるプラグイン開発に対応。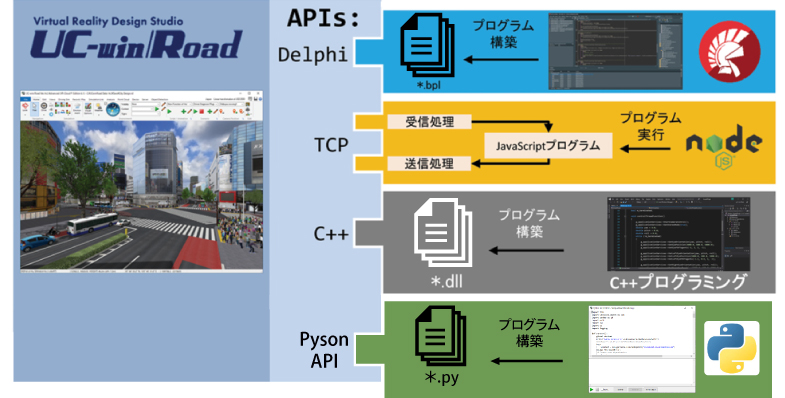
- ■Shade3D、Shade3D SDK(開発キット)
統合型3DCGソフトShade3Dの高いパフォーマンスの追加機能をC++言語によって開発可能。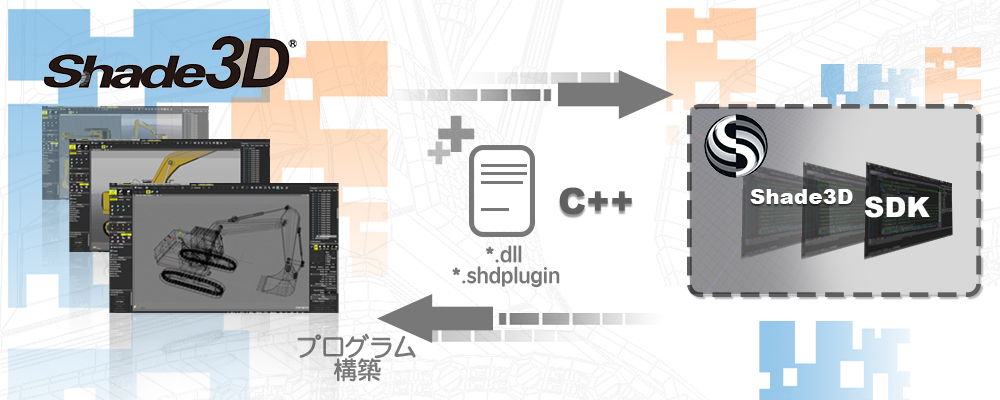
- ■メタバニアF8VPS
(フォーラムエイト メタバース)
3DVR空間とアバターを介したコミュニケーションツールで、オフィス・ショールーム、イベント・工場見学、作業訓練や業務管理など、目的に合わせたメタバースの作成・編集が可能。
- ■スイート千鳥エンジン®
国産クロスプラットフォーム3Dゲームエンジン。Windows版・iOS版ライブラリに対応。制作効率化ツールにエディター機能追加。
【開発環境】
■UC-win/Road SDK:Delphi、C++、Python、JavaScript
■Shade3D SDK:C++
■VR-Cloud® SDK:Delphi、Angel Script
■a3s SDK:Delphi、C/C++
■スイート千鳥エンジン®:Visual Studio 2019
C#、C++、JavaScript、java、Pascal、Python、Fortran、Ruby、R言語等で開発したシステムの組込みや連携も対象とします。


