管理人のイエイリです。
工場など広い敷地の警備は、警備員が定期的にパトロールしたり、監視カメラをあちこちに設けたりする必要がありました。
しかし、こうした方法だと警備員がその場にいない時や監視カメラが撮影できない場所などにはどうしても「死角」ができてしまいます。
こうした問題を解決するため、セコムは世界初の民間用防犯システムを開発しました。その秘密兵器とは、
ナ、ナ、ナ、ナント、
空飛ぶ監視ロボット
なのです。
セコムの画像解析技術やセンシング技術、ロボット技術などを駆使し、自律的に飛行する小型飛行監視ロボットで、実用化に向けて研究開発を進めています。
 |
|
|
セコムが開発した自律型の小型飛行監視ロボット試作機(写真・資料:セコム。以下同じ) |
|
 |
|
| 飛行中の監視ロボ |
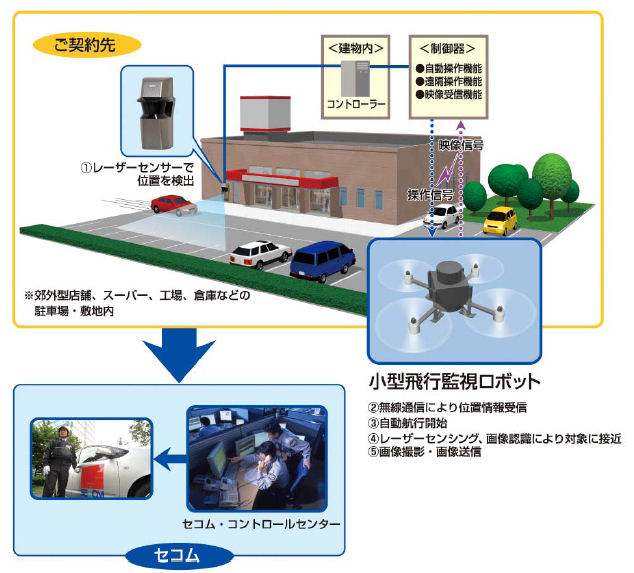
不審なクルマや人が敷地内に侵入すると、レーザーセンサーで位置を計測し、監視ロボに伝えます。
すると監視ロボは敷地内に設けた“基地”から自動的に離陸し、不審なクルマや人に接近し、画像を撮影します。
その画像はすぐにセキュリティーシステムに送信され、コントロールセンターの担当者が画像を確認するとともに、必要に応じて本物のガードマンが出動する、という仕組みです。
 |
|
|
自律型の小型飛行監視ロボットのサービスイメージ |
監視ロボは、ドイツのアセンディング・テクノロジー社(Ascending Technologies GmbH)が開発した「飛行台車」をベースに作られており、画像処理や画像分析、センシングなどの技術を応用した装置が搭載されています。
そのため、撮影位置や撮影方向を自動制御できます。そして、一度、不審なクルマなどに接近した後は、その“ターゲット”を
自動追跡
して、逃走ルートを的確にとらえることができます。
 |
|
|
不審車両を追跡するデモンストレーション |
|
 |
|
| 監視ロボのカメラが撮影したナンバープレートの画像 |
セコムが記者発表した時のビデオを見ると、この監視ロボは非常に安定して飛行できることが分かります。
警備や点検などの業務は、これまで人間が現場に行ってその目で確かめるというスタイルが一般的でしたが、モバイル機器やクラウドコンピューティングシステムの進化で、現場での情報収集と判断・行動機能を分けることが可能になりつつあります。
セコムの監視ロボもこうした流れに乗ったものでしょう。こうした飛行ロボは海外が先行している面もありましたが、今回、セコムが日本企業として世界初の飛行監視ロボを開発したことは、勇気づけられますね。
この監視ロボの技術は、橋梁や鉄塔などの構造物の点検にも応用できそうです。現場での情報収集をこうした監視ロボに任せると足場を組む必要もなくなります。
そして補修などが必要な時だけ人間が行くようにすることで構造物の維持管理の生産性は大幅に上がりそうです。