管理人のイエイリです。
建物の維持管理に欠かせない床下点検ですが、現場では 「狭い、低い、暗い」場所で、配管や基礎などを避けながら、うつ伏せで進む危険で重労働な作業が付き物です。
人手不足や高齢化が進む中、「何とかならないのか」と感じている現場も多いのではないでしょうか。
電気通信大学(所在地:東京都調布市)、大末建設(本社:大阪市中央区)、ミサワホーム(本社:東京都新宿区)の3社は、そんな現場のお困りごとを解決しようと、新型ロボットの開発を続けてきましたが、このほど実用化段階に到達しました。
その名も「ユカダイショウ」というように、
ナ、ナ、ナ、ナント、
ヘビ型の点検ロボット
なのです。(ミサワホームのプレスリリースはこちら)

共同開発した床下点検ロボット「ユカダイショウ」(写真:電気通信大学 田中基康研究室)
このロボットは、障害物が多く、限られた断面の中を移動しながら点検を行うことを目的に設計されています。
全長115cm、断面は15cm×15cmと小さいので、「配管の間をすり抜ける」「段差や障害物を避けながら前進する 」「低い床下でも引っかからずに進む」といった機動力を発揮します。
先端部にはカメラやLiDARを搭載し、移動しながら映像を取得します。人や従来の車両型ロボットが入り込めない床下でも、点検の目を送り込むことができます。
操作はゲームコントローラーで直感的に行えるほか、半自動乗り越え機能が付いているので、障害物の乗り越えも100%成功するとのことです。
その様子は、狭いトンネルを通過しながら線路を点検する車両のようで、“床下界のドクターイエロー”という感じですね。

カメラからの映像(以下の写真:ミサワホーム)

ロボットによる点検で発見したコンクリートのひび割れ
カメラからの映像だけだと、今、床下のどの部分にロボットがいるのかわからなくなることもありそうです。
その問題をカバーするために、前面に搭載したLiDARセンサーと、事前読み込ませた図面を連動させることで、
自己位置を推定
し、表示する機能もあります。
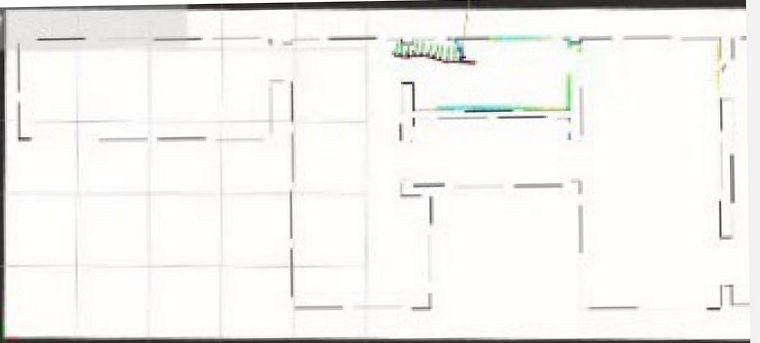
事前に読み込ませた床下の図面と推定されたロボットの位置
このロボットの実用化により、床下点検は1人で安全な場所から遠隔で行える作業に変わります。
また、点検映像をデータとして残せるので、将来的には経時変化の比較やAI(人工知能)による異常検知、そして災害時の点検や人命救助など、さらなる進化が期待できそうですね。
●床下点検ロボット「ユカダイショウ」の主な仕様
| 名称 | 床下点検ヘビ型ロボット「ユカダイショウ™」 |
| 寸法 | 長さ約1,150㎜、幅150㎜、高さ150㎜ |
| 重量 | 約7.2kg(バッテリー含む) |
| 対応可能高さ | 障害物(配管など)高さ約400㎜程度まで対応可能 |
| 駆動方式 | バッテリー仕様(Minshi製充電バッテリ22.2V 1.8Ah 2個) 車輪駆動(連節部各々が駆動) |
| 走行速度 | 最速250㎜/s(操縦用ゲームパッドにて減速可能) |
| 旋回半径 | 約250㎜ |
| 起動速度 | 約60秒(起動後、約20秒で点検開始可能) |
| 搭載機材 | 可動域パンチルト全方位360度カメラ、駆動制御用PC搭載 |
| 通信方式 | WiFi通信(現場の無線環境に依存) |
| 動作時間 | 約70分(連続稼働時間) |
| 充電速度 | 約50分 |