管理人のイエイリです。
橋梁の耐震補強工事では、橋桁の落下を防ぐため橋脚に鋼製ブラケットを取り付ける作業が欠かせません。
一般的にはクレーンでブラケットを吊り上げて設置しますが、最後はチェーンブロックを数個設置して、人力で設置位置まで持ち上げます。

耐震補強用の鋼製ブラケット(以下の写真、資料:人機一体)
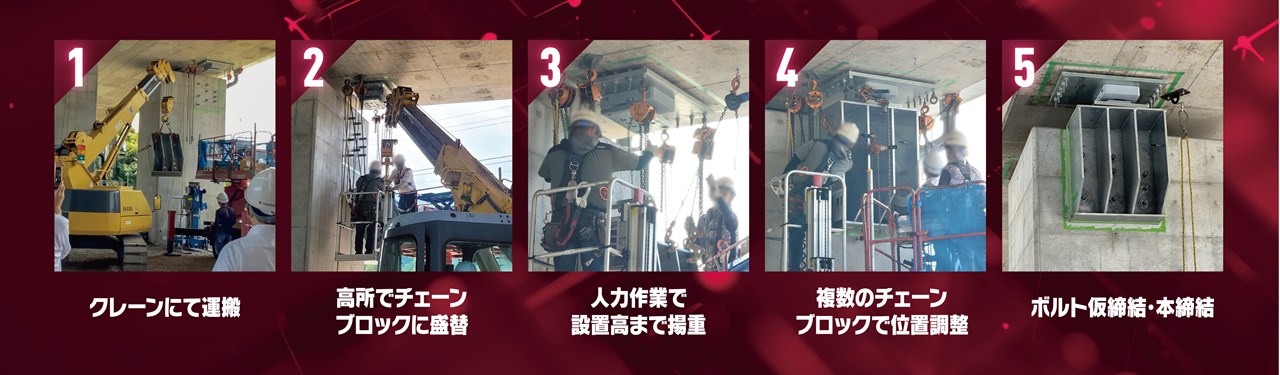
クレーンを使った鋼製ブラケットの設置手順
この作業は高所・狭所で行われるうえ、チェーンブロック用の支持アンカー設置や、揺れる吊り荷の位置合わせなど、複雑で手間のかかる仮設や段取り計画など、熟練の技が求められます。
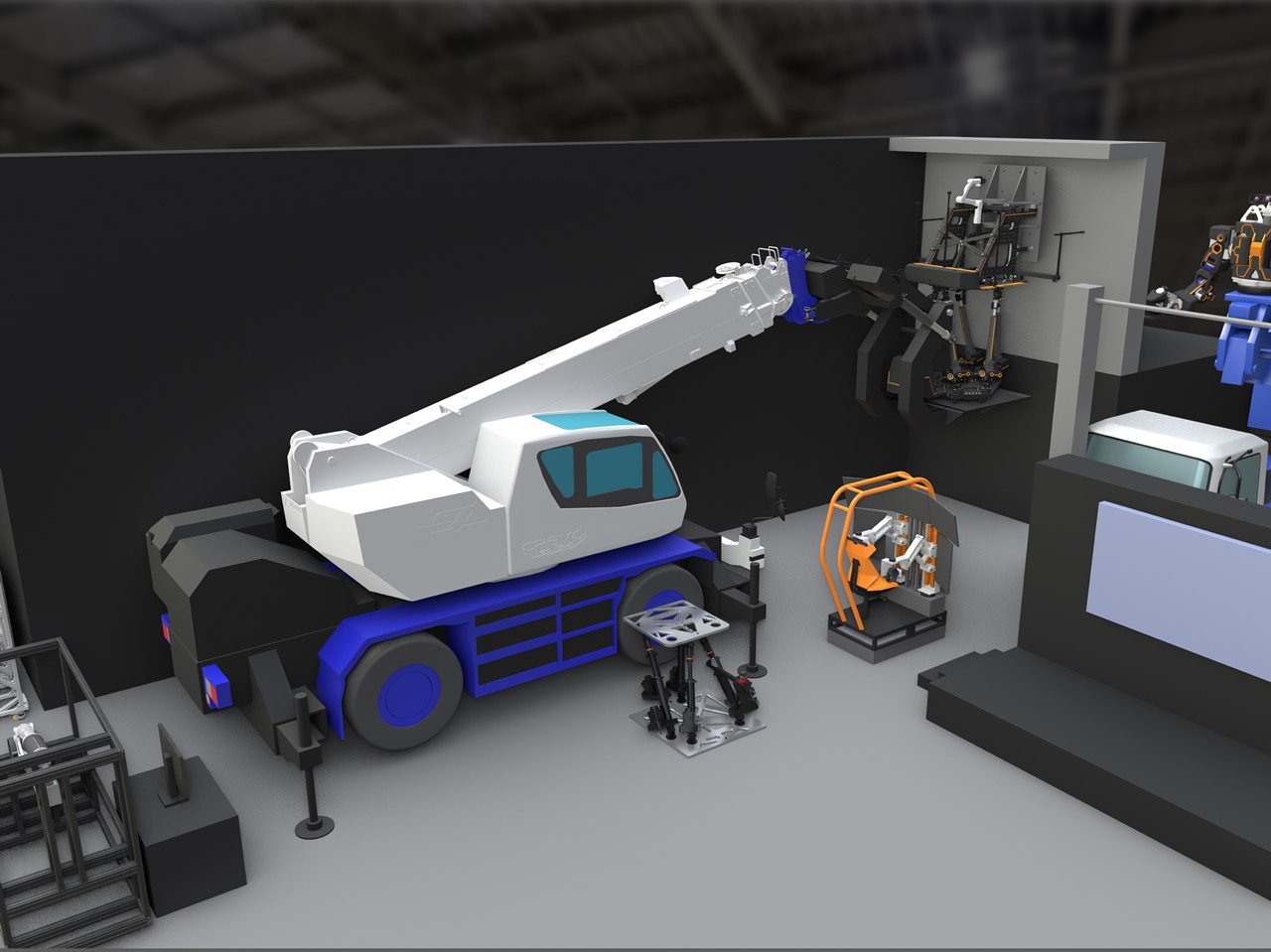
そんなお困りごとを解消しようと、人機一体(本社:滋賀県草津市)と竹中土木は、「人機スチュワートプラットフォーム ver.2.0」(以下、プラットフォーム)という“新兵器”を開発しました。
クレーンを使って部材を吊り下げるのではなく、
ナ、ナ、ナ、ナント、
下から支える
ように設置できるのです。(人機一体のプレスリリースはこちら)

部材を下から支えるプラットフォームを取り付けたクレーン
プラットフォームによる鋼製ブラケットの設置作業イメージ
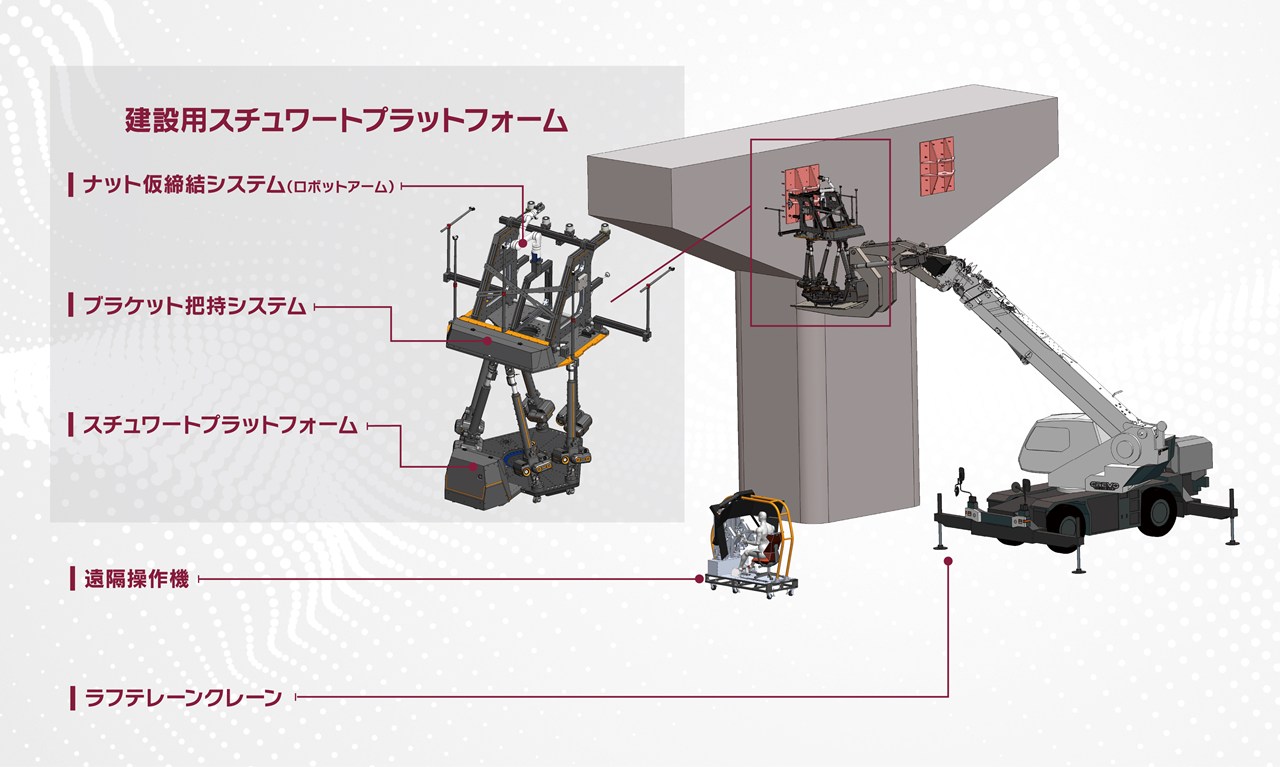
プラットフォームの構成
このプラットフォームは、6本のシリンダーが付いており、鋼製ブラケットの位置や傾きを3次元的に高精度で調整できます。
さまざまな形状の鋼製ブラケットを確実につかめるように、電磁吸着式の把持機構を備えており、クレーンのブーム先端に搭載された小型の7自由度ロボットアームでナットの仮締めまでを行えます。
これらの装置は遠隔操作で制御できるので、地上から安全に作業できます。
ブラケット1基あたりの作業時間は、従来のクレーンとチェーンブロックだと120分かかるところが、プラットフォーム使用の場合は、
わずか30分に大幅短縮
できる見込みです。
このほか、チェーンブロック用アンカーや大掛かりな仮設、事前の細かい段取り計画が不要になり、安全性も高まるなど、さらなる生産性向上効果が期待できそうです。
人機一体では2026年中を目標に実現場での実証試験を目指し開発を進めています。

予備試験の様子
これまでのクレーンは吊るだけの機械でしたが、今回のプラットフォーム開発をきっかけに「クレーン用ロボットアタッチメント」という新たなジャンルを切り開く可能性も見逃せません。
アームの先端にロボットを搭載することで、配管や外装パネル、点検、解体など、クレーン先端で行える作業が一気に広がる可能性があり、クレーンによる施工方法を広げるきっかけとなりそうです。
このプラットフォームは、2025年12月3日(水)~6日(土)に東京ビッグサイトで開催される「2025 国際ロボット展(iREX2025)」の人機一体ブース(東7ホール内。小間番号:E7-61)で、ラフテレーンクレーンに取り付けてデモを行う予定です。ご興味のある方は出掛けてみてはいかがでしょうか。