管理人のイエイリです。
山岳トンネルの掘削現場では、掘った穴に火薬を詰める「装薬作業」が欠かせません。
細かい位置合わせや力加減が必要なため、これまでは熟練者が手作業で行ってきました。一方、切羽の真下に人が入るので、常に落石や崩落のリスクと隣り合わせです。
危なくて人手も要る作業というのが、ずっと現場の悩みでした。
そこで、大林組と慶應義塾大学ハプティクス研究センター(所在地:東京都港区)、同大学理工学部の野崎貴裕准教授は、切羽に火薬を装填する「自動火薬装填システム」の開発を着々と続けてきました。(2024年12月3日の当ブログ参照)
このシステムがこのほど、大幅に進化して、
ナ、ナ、ナ、ナント、
火薬の連続装てん
が可能になったのです。(大林組のプレスリリースはこちら)

切羽に親ダイを連続装填するロボット(以下の写真:大林組)
自動火薬装填システムの完成イメージ
これまでは火薬(親ダイ)を1本ずつ、慎重に入れていくイメージでしたが、今回の進化で、切羽の穴に次々と連続装填できるようになりました。現場的には、実用化へと一歩近づきました。
このシステムは、装薬孔に火薬を入れる装填ロボットと、複数本の親ダイを送り出す親ダイ供給装置、そして離れた場所にある遠隔操作室からなります。
使い方の流れは、まず装填ロボットを重機で切羽近くに設置します。次に親ダイ供給装置のベルトコンベアに、複数本の親ダイを並べてセットします。オペレーターは切羽から離れた操作室に入り、モニター映像を見ながらロボットを操作します。
多数の親ダイを並べた親ダイ供給装置

親ダイを受け取り、切羽の穴に装填するロボットアーム
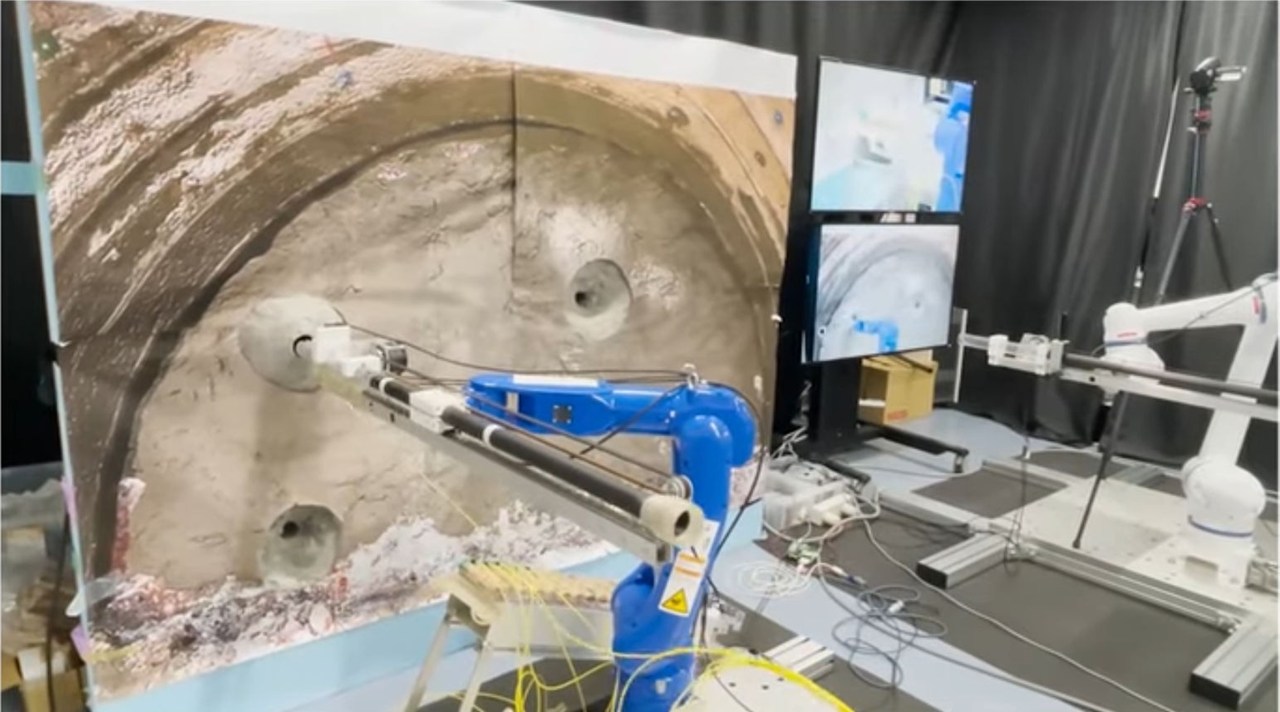
リアルハプティクスで力加減を感じながら親ダイを穴の奥まで送り込む
ここで効いてくるのが、力触覚技術「リアルハプティクス」です。ロボットが岩盤や孔の壁に当たったときの抵抗感が、そのまま操作室のオペレーターの手元にも伝わります。
ロボットは受け皿から親ダイをつかみ、孔の位置に合わせて挿入します。1本終わると、供給装置から次の親ダイが出てきて、同じ動作を繰り返します。
さらに今回の進化により、
切羽の下の方にも装填
できるようになり、切羽全体をカバーできるようになりました。
これまでの装置は、上向き作業だけに対応していましたが、今回のシステムでは、装填ロボットと親ダイ供給装置の設置向きを工夫することで、下側の孔にも対応できるようになっています。

従来のロボット(左)は上だけだったが、今回の開発で下向きでも作業可能になった(右)
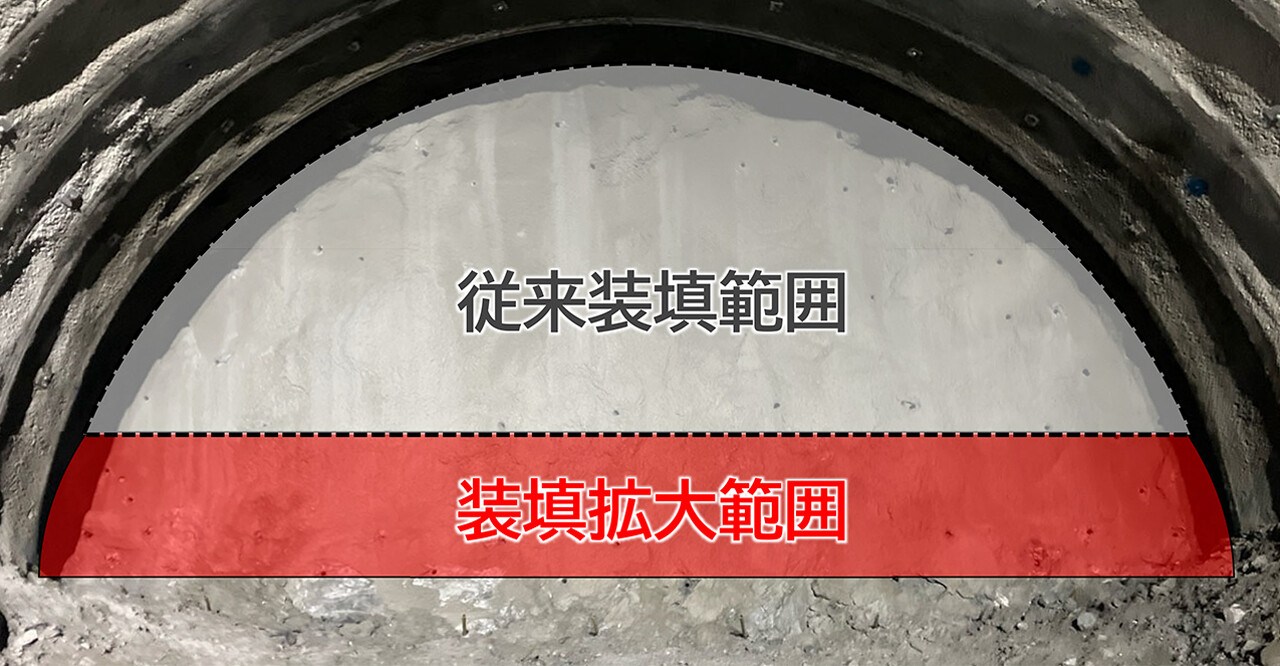
遠隔装てんの範囲は切羽全体をカバーした
この技術によって、切羽直下に人が入らずに済むため、切羽崩落などの事故リスクを下げられそうです。
大林組と慶應義塾大学は今後、複数台での装てんや大型重機の自動運転との連携、そして親ダイの雷管に起爆用の電線を取り付ける「脚線結線」の自動化も目指すとのことです。
さらに注目したいのは、「リアルハプティクス」の広がり方です。大林組と慶應義塾大学は、過去に左官作業の遠隔操作や、重機で岩石の硬さを感じ取りながら掘削する研究も行っています。
人間の触覚の優秀さは、なかなかロボットやセンサーではまねできません。リアルハプティクスにより、巨大なものからミクロなものまで、触覚を生かしたベテランの職人芸が拡張できると、現場作業の遠隔化が広がりそうですね。