管理人のイエイリです。
東京大学発のスタートアップ、ARAV(本社:東京都文京区)は、テレワークを想定した建設機械の遠隔操作や、自律運転の技術を開発しています。
同社はこのほど、ビスペル(本社:静岡県富士市)と共同で、油圧ショベルによる掘削から、ダンプトラックへの積み込みまでを自律的に行う実証実験に成功し、事業化に向けての取り組みを開始しました。

自律的に土砂をすくい、ダンプトラックに積み込む油圧ショベル。運転席には誰も乗っていない(以下の写真、資料:特記以外はARAV)
こうした自動制御を行うためには、油圧ショベルやダンプトラックの位置を高精度に把握する必要がありますが、ここで使ったのは
ナ、ナ、ナ、ナント、
準天頂衛星みちびき
だったのです。(ARAVのプレスリリースはこちら)
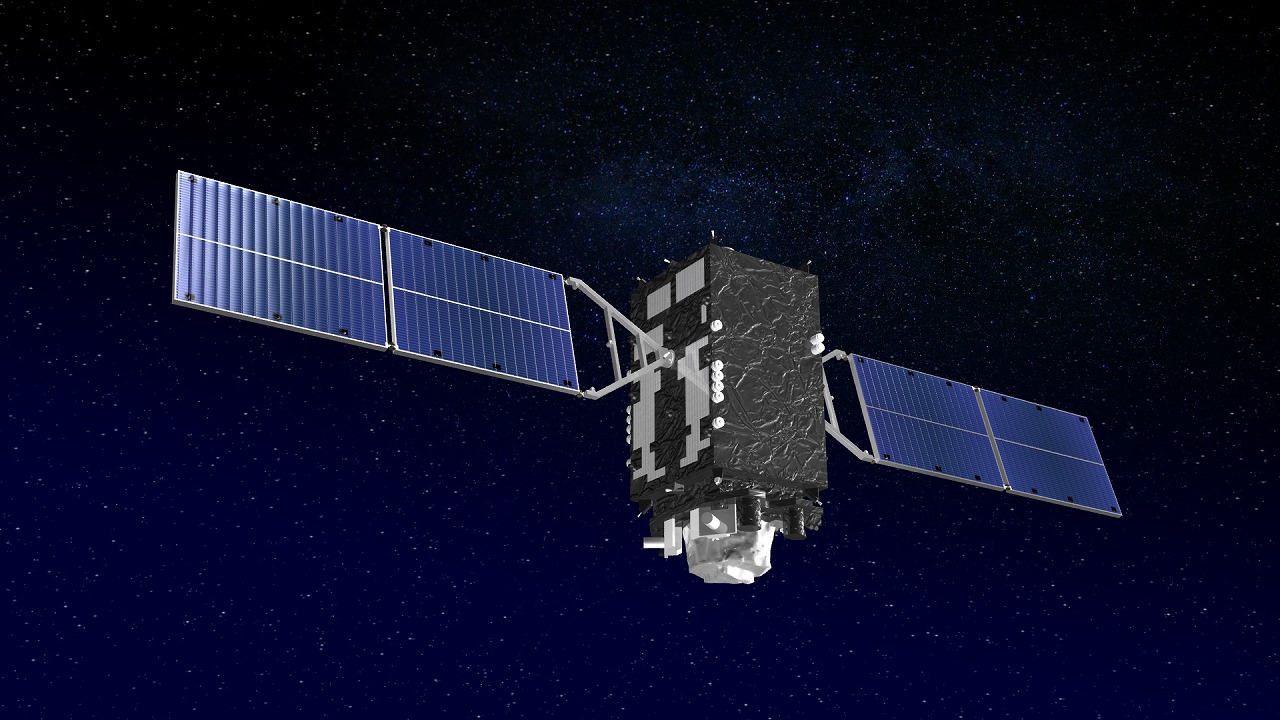
準天頂衛星「みちびき」(資料:内閣府宇宙開発戦略推進事務局)
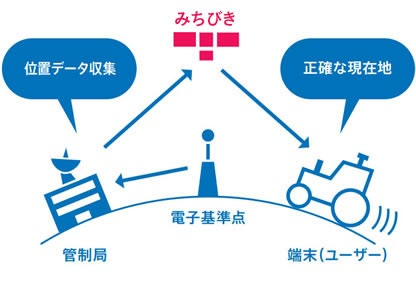
「みちびき」に搭載されている「センチメータ級測位補強システム(CLAS)」の概念図(資料:内閣府宇宙開発戦略推進事務局)
みちびきは通常のGNSS(全地球測位システム)の衛星としての機能だけでなく、「センチメータ級測位補強システム(CLAS)」という機能も搭載しています。
これは、地上の電子基準点約300カ所で受信した電波をもとに作成した「補正情報」を、宇宙から地上に向かって送信する機能です。
通常、補正情報はインターネットや携帯の電波で受信しますが、みちびきのおかげで人工衛星からの電波だけで、10cm(サブメーター)程度の精度で位置を計測できるのです。
建設業では携帯のサービスエリア外で作業することも多いので、みちびきからの補正情報が使えると、とても便利ですね。
精度については精密なICT土工にも使われる「RTK-GNSS」ほどではありませんが、土砂の積み込みや移動などには十分でしょう。
今回、実証実験が行われた掘削・積み込み実験では「建機・周辺環境の状態認識」と「掘削・積み込み動作の生成と実行」を繰り返すシステムを開発しました。
建機・周辺環境の状態に認識には、建機に搭載された姿勢センサーやGNSS、3次元スキャナーなどの複数のセンサーからのデータを統合し、リアルタイムな可視化も行いました。
掘削・積み込み動作の生成と実行では、掘削すべき点や積み込みを行う点への動きを自律的に計算し、動作を実行します。

「建機・周辺環境の状態認識」と「掘削・積み込み動作の生成と実行」を繰り返す

複数のセンサーのデータを統合し、リアルタイムに可視化した
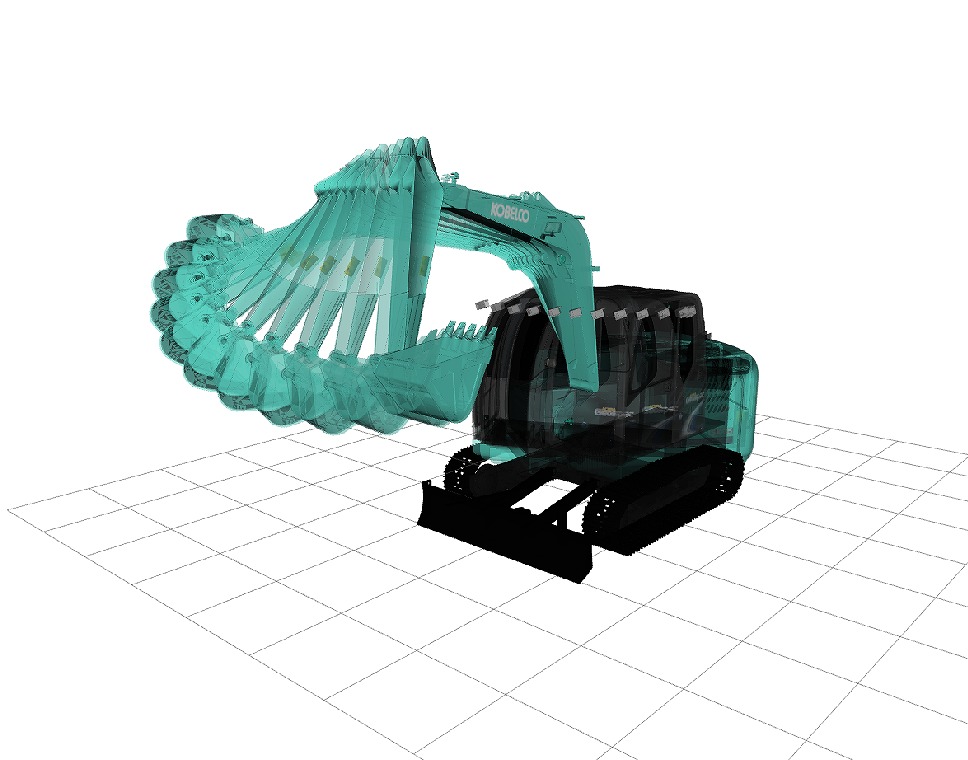
掘削すべき点や積み込みを行う点への動きを自律的に計算し、実行する
ARAVではこのほか、日建(本社:山梨県南アルプス市)、平賀建設(本社:山梨県韮崎市)と共同で、
クローラーダンプの遠隔操作
も開発し、事業化を開始しています。(ARAVのプレスリリースはこちら)

遠隔操作に成功したクローラーダンプ
遠隔操作の建機も、みちびきによる高精度な位置計測機能が搭載されていれば、コースからの逸脱前にアラートを出すなど、安全性や操作性の向上につながりそうですね。
建機運転のテレワーク化や自律化が現場で使われるようになる日は、もう目の前に来ています。