管理人のイエイリです。
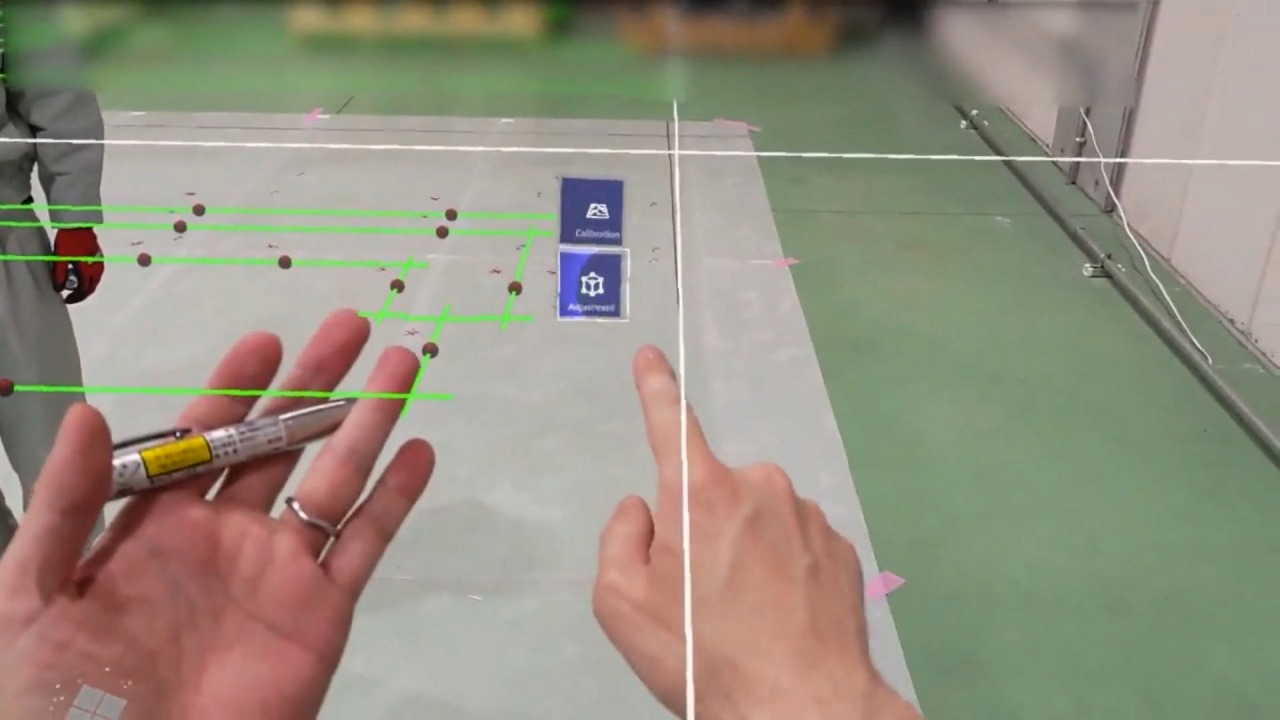
1人が緑色の線上にある赤い丸印にレーザーポインターを当てると、もう1人がフェルトペンで×印を付けていく。
淡々と繰り返されるこの作業は、階下の配管などを吊り下げるボルトを取り付ける「インサート」と呼ばれる部材の位置を、床スラブ上に墨出しする実験です。

緑の線上にある赤丸のところに、フェルトペンで墨出しする作業(特記以外の写真、資料:インフォマティクス)

床スラブに埋め込む「インサート」(写真:家入龍太)
この緑の線や赤丸は、レーザーポインターを持った人しか見えていません。というのも、墨出しの位置データをMR(複合現実)化し、
ナ、ナ、ナ、ナント、
HoloLens 2で現場に重ねて
見ているからなのです。(インフォマティクスのプレスリリースはこちら)

レーザーポインターを持った人は、HoloLens 2を通して墨出し位置のデータを見ていた
これは建設業向けのMRソフト「GyroEye Holo」を開発・販売するインフォマティクス(本社:神奈川県川崎市)が、建築設備大手のヤマト(本社:群馬県前橋市)、設備用BIM(ビルディング・インフォメーション・モデリング)ソフト「Rebro」を開発・販売するNYKシステムズ(本社:東京都中央区)と、共同で行った墨出し実証実験です。
墨出しの手順はまず、Rebroの開発版から、インサートや配管ルート、通り芯などの座標情報のみを出力し、Microsoft HoloLens 2の専用システムに取り込みます。
その後、原点の位置合わせを行い、1人がMicrosoft HoloLens 2をかぶって、レーザーポインターを使ってインサートの位置を指示し、もう1人が墨出しをします。
今回は75点の墨出しを行いました。トータルステーションを使って2人で行った場合は75分かかりましたが、HoloLens 2とレーザーポインターを使った場合はわずか7分30秒しかかからず、
10倍の生産性向上を実現
したのです。
気になる精度ですが、75点中、許容誤差の±20mm以内に入っていたのが58点、±30mm以内だと99%が入っていたそうです。
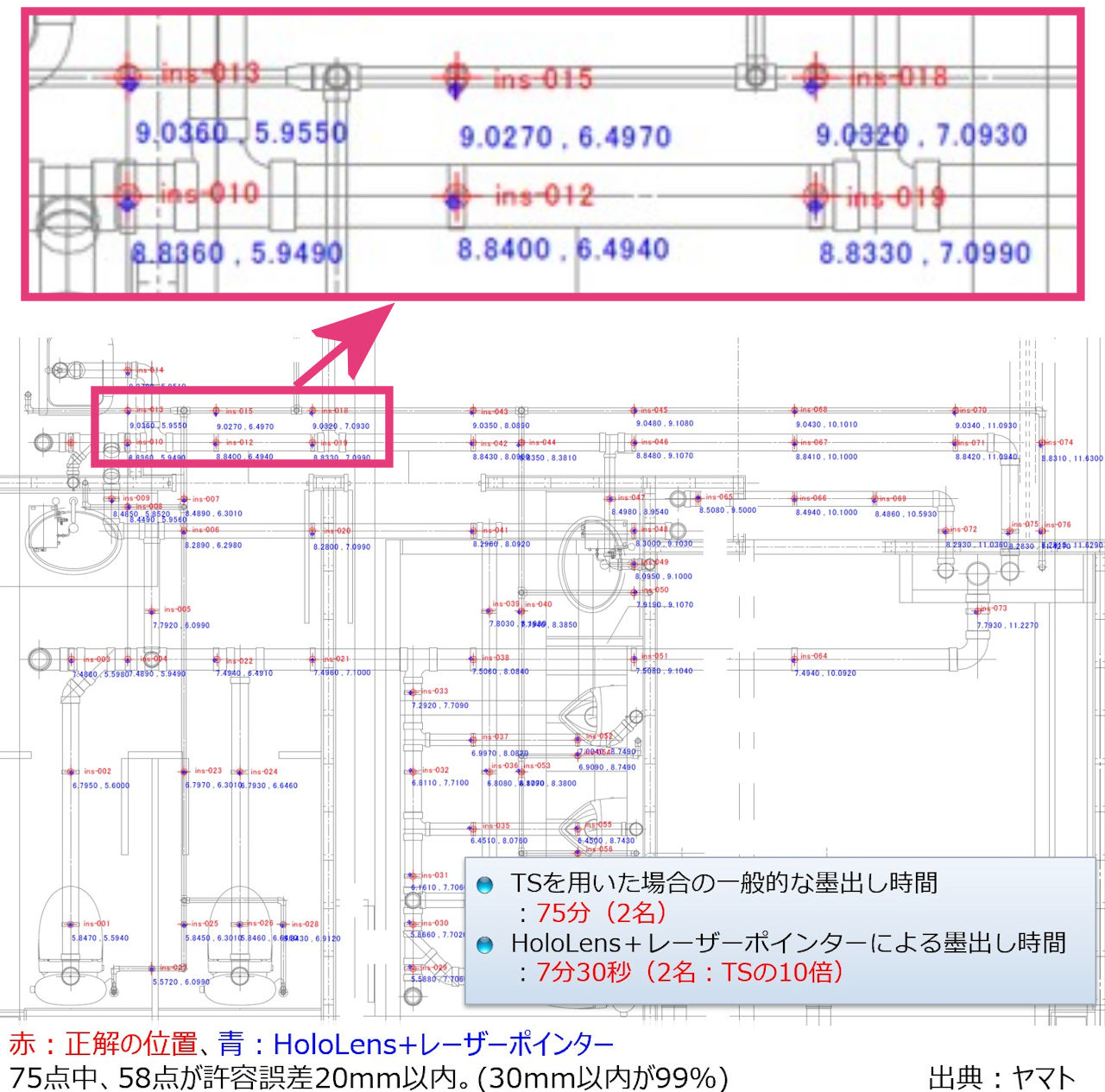
トータルステーションとHoloLens 2による墨出し結果の比較
ちなみに、HoloLens 2をかぶった人自身がフェルトペンを持って墨出しした場合は、さらに速く4分半で完了したそうですが、精度が悪かったそうです。速度と精度のバランスから、2人で行う方法が良いとのことでした。
HoloLens 2で墨出しを行う場合、原点の位置合わせは大変、重要です。以前は四角いマーカーを現場に置いて原点としていましたが、今回は原点と方向の2点を合わせることにより、より精密な位置合わせを行いました。

従来、位置合わせに使っていたマーカー(写真:家入龍太)

今回の位置合わせ法。まず遠方の1点を位置合わせし(上)、続いて原点を位置合わせする(下)
この実験ではRebroからの墨出し用データをHoloLens 2で表示するために、専用ツールで変換しましたが、今後はRebroでMR用のデータを作成し、HoloLens
2に取り込めるようにする予定です。
そうなると、データを準備する段階の作業がさらにスピーディーとなり、BIM→HoloLens 2による墨出しワークフローがスムーズになりますね。