管理人のイエイリです。
障害者雇用促進法で定められた障害者雇用率の引き上げや、企業の意識改革が高まるにつれ、オフィスで活躍する障害者の姿を以前より多く目にするようになりました。
しかし工事現場では、バリアフリー化が行き届きにくく、危険も多いため、技能やスキルがあっても障害者が働くためには多くの制約がありました。
こうした就業上の制約を取り払おうと、コベルコ建機は建設機械の遠隔操作とクラウドマッチングシステムを融合させた「K-DIVE CONCEPT(以下K-DIVE)」をテーマに研究開発を進め、
ナ、ナ、ナ、ナント、
「誰でも働ける現場」
の実現を目指しているのです。(K-DIVEのウェブサイトはこちら)

「K-DIVE」で開発中に遠隔操作システム。座席には現場の建機の振動や傾きなどを伝える「フォースフィードバックシステム」が組み込まれている(特記以外の写真、資料:コベルコ建機)
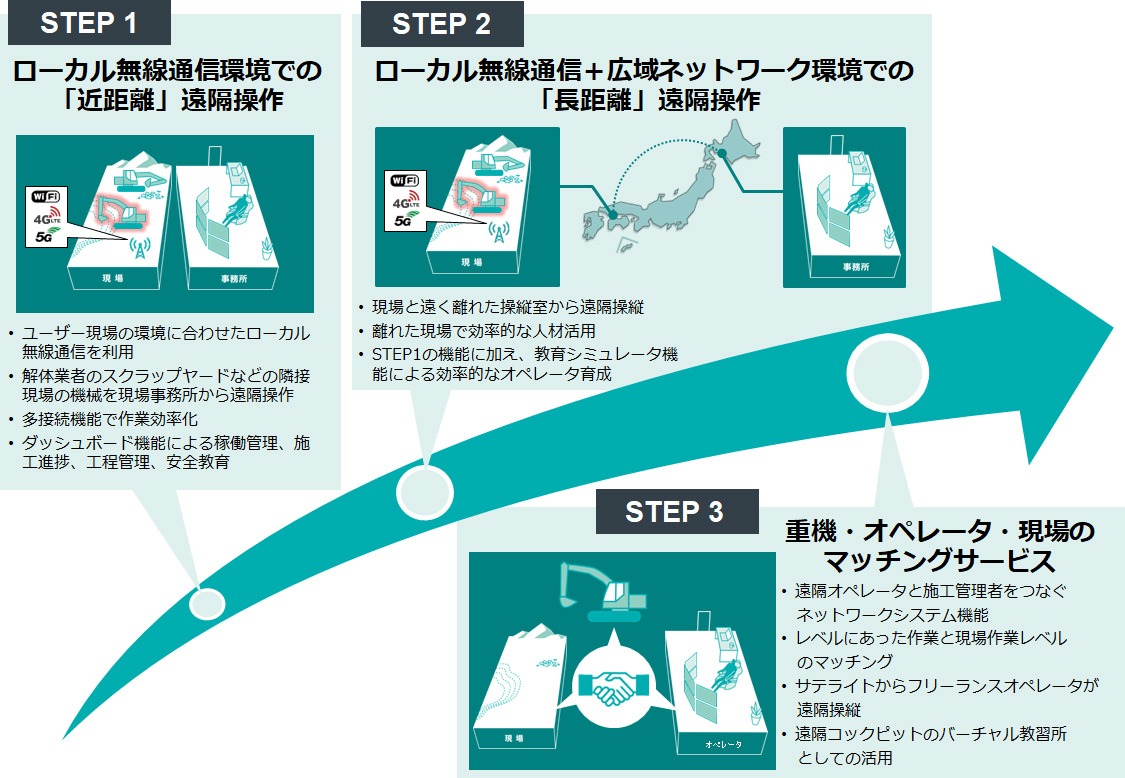
3段階に分かれた「K-DIVE」の研究・開発ステップ
K-DEVEは2015年のコンセプト策定からスタートし、日本マイクロソフトや北海道総合通信網、ライカジオシステムズ、センシンロボティクスなど様々な企業と連携しながら、ステップ1~3に分けて開発が進んでいます。
ステップ1は、現場内で現場事務所から現場内の建機を遠隔操作する「近距離遠隔操作」の開発がテーマです。産業振興(本社:東京都千代田区)の協力を得て、解体業者のスクラップヤードなどを対象に2022年の実用化を目指し、最終段階へと進んでいます。
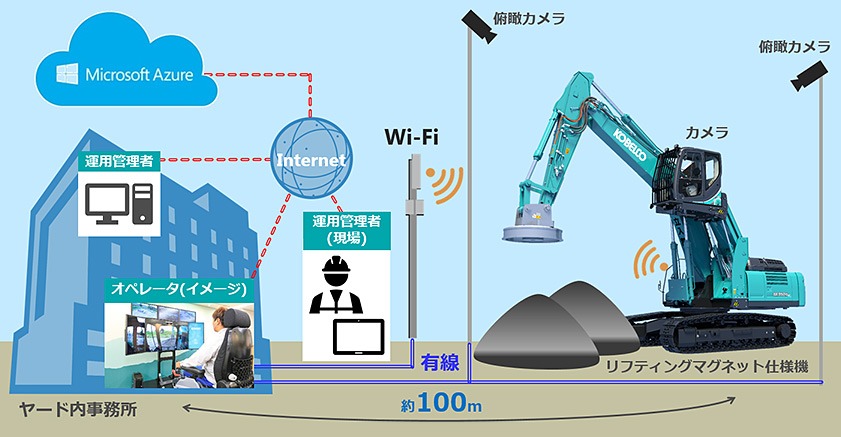
産業振興の協力を得て行った、ステップ1の実用化検証のイメージ

スクラップヤードの建機を遠隔操作する現場事務所のコックピット
ステップ2は光ファイバーケーブルなど広域ネットワークを活用した「長距離遠隔操作」の実現です。コベルコ建機はこのほど、NECとも技術開発協定を締結しました。
その第一弾として、コベルコ建機五日市工場に設置したK-DIVEのコックピットと、NECの「重機遠隔操縦サービス」を接続し、NEC我孫子事業場の実証フィールドにある油圧ショベルを遠隔操作する実証実験を行いました。
その結果、お互いのシステムの通信状況や作業性などを損なわず、安定した映像配信やスムーズな作業操作が可能であることを確認しました。
NECが実物の建機を備えた実証フィールドを持っているということにも、驚かされますね。

小型の無人バックホーやクローラーキャリアなどを備えたNEC我孫子事業場の実証フィールド(写真:NEC)

NEC我孫子事業場の遠隔操作室(写真:NEC)
そして、2025年に実用化を目指すステップ3では、遠隔操作と
クラウドマッチングシステム
を融合させることを最終目標としています。
これが実現すると、遠隔地にいる「フリーランスオペレーター」と現場がネットワークでつながり、スキルに合った現場業務とオペレーターをマッチングさせて、施工業務をテレワーク化するといったことも可能になりそうです。


ステップ3が実現したときのイメージ。バックホーのスキルはあるが、車イス生活をしているため実際の現場には通勤できない人(上)も、遠隔操作のコックピットに乗り換えて現場の施工業務に参加できる(下)
また、遠隔操作システムは重機オペレーターの教習にも役立ちそうです。実物の建機だと、普通、乗員1人分の席しかないので、教官はトランシーバーなど声で教えることしかできません。
ところが遠隔操作のコックピットだと、周りに人が立ってあれこれと具体的にアドバイスすることができるからです。
遠隔操作のコックピットなら教官がすぐそばに立って、具体的なアドバイスを行いやすくなるので建機の教習も効率的に行えそうだ
コベルコ建機は「K-DIVE」」の開発構想について、YouTube上に「KOBELCO IoT イノベーションストーリー」という10分ほどのビデオを公開しています。これを見ると、遠隔操作によって障害者などがどのように現場業務に参加できるようになるかというイメージがよくつかめますよ。