管理人のイエイリです。
屋内の工事現場で、進捗(しんちょく)管理に欠かせないのが、工程ごとに作業状況や経過を記録した写真です。
ただ、ビル工事など屋内の現場は、GNSS(全地球測位システム)の位置情報が使えないので、多くの場合、撮影場所を「階」や「工区」などで写真管理システムに手入力しているのが現状です。
また、異なる日付の写真を比較する時は、それぞれの日付のフォルダから同じ場所写真を探す必要があるので、時間と手間がかかっていました。
こうした問題を解消し、撮影の手間も大幅に省こうと、大林組はNTTドコモ、NTTコムウェアと共同で効率的に進捗管理を行う実証実験に成功しました。
現場の撮影に使用したのは、
ナ、ナ、ナ、ナント、
ドローン
だったのです。(大林組、NTTドコモ、NTTコムウェアのプレスリリースはこちら)
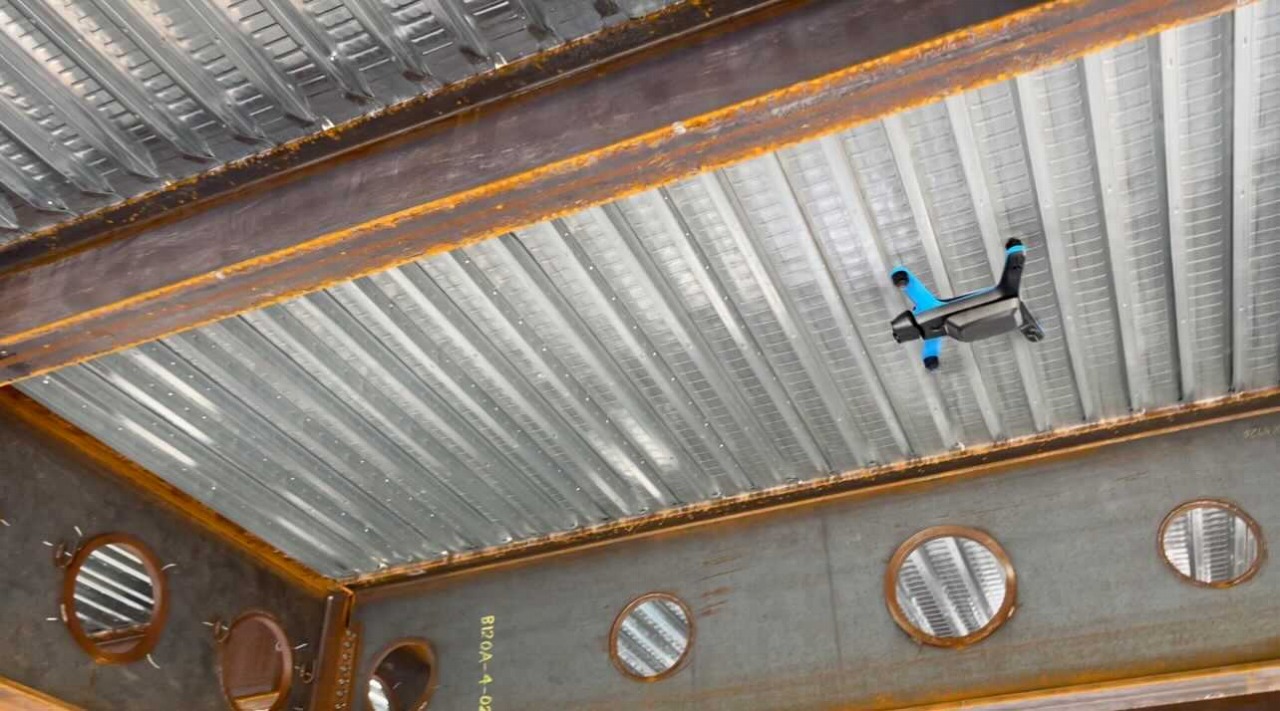
屋内の建設現場を巡回するドローン(以下の写真、資料:大林組、NTTドコモ、NTTコムウェア)
今回の実証実験は、2021年7月15日~8月3日に、東京都品川区内にある建設現場で、約500m2の室内空間を使って行いました。
数日間隔で3回、ドローンを現場内で自律飛行させて、あらかじめ記憶させた116カ所から工事写真を自動的に撮影。各日の工事写真を、3Dデータ上にひも付けて整理しました。
その結果、現場内の同一場所で撮影された写真を、簡単に時系列で比較できるようになったのです。
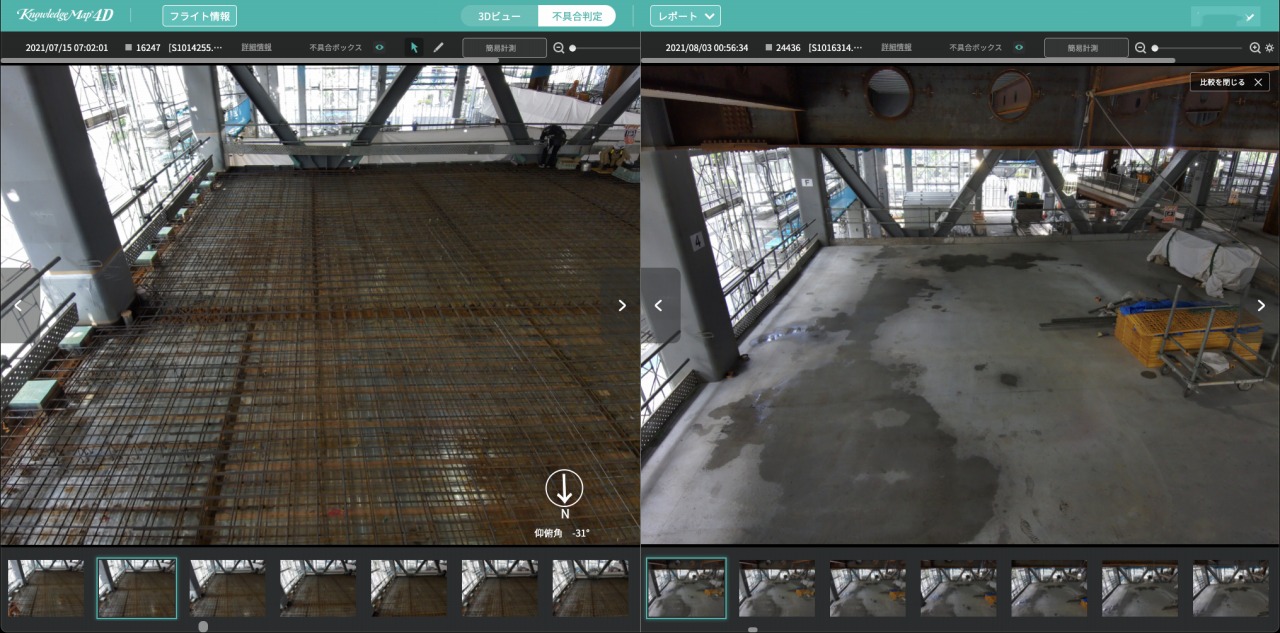
ドローンで同じ場所から撮影した工事写真の比較。左が2021年7月15日、右が同8月3日の状況
使用されたドローンは米国・Skydio社製の「Skydio 2」で、本体の大きさは縦223 x 横273 x 厚さ74 mmとコンパクトサイズです。
ドローン機体の上下には計6個のカメラが搭載されており、取得した映像から自己位置を推定することが可能で、障害物回避しながら飛行できます。
飛行プログラムはドコモが「Skydio 2」向けに開発した技術検証用飛行プログラムを使用しました。多地点を通過するルートの事前設定が可能となり、GNSSが使いにくい環境でも、複雑なルートを自動的に自律飛行することができます。
また、撮影した写真の処理はNTTコムウェアのドローン点検ソフト「KnowledgeMap4D」を使いました。
ドローンが撮影した写真を
3D点群データ
として「デジタルツイン」(デジタルの双子)化し、建設現場を3D空間上に再現します。
そして「KnowledgeMap4D」上に表示された任意の点を選択すると、その場所の異なる日付の工事写真を表示できるのです。
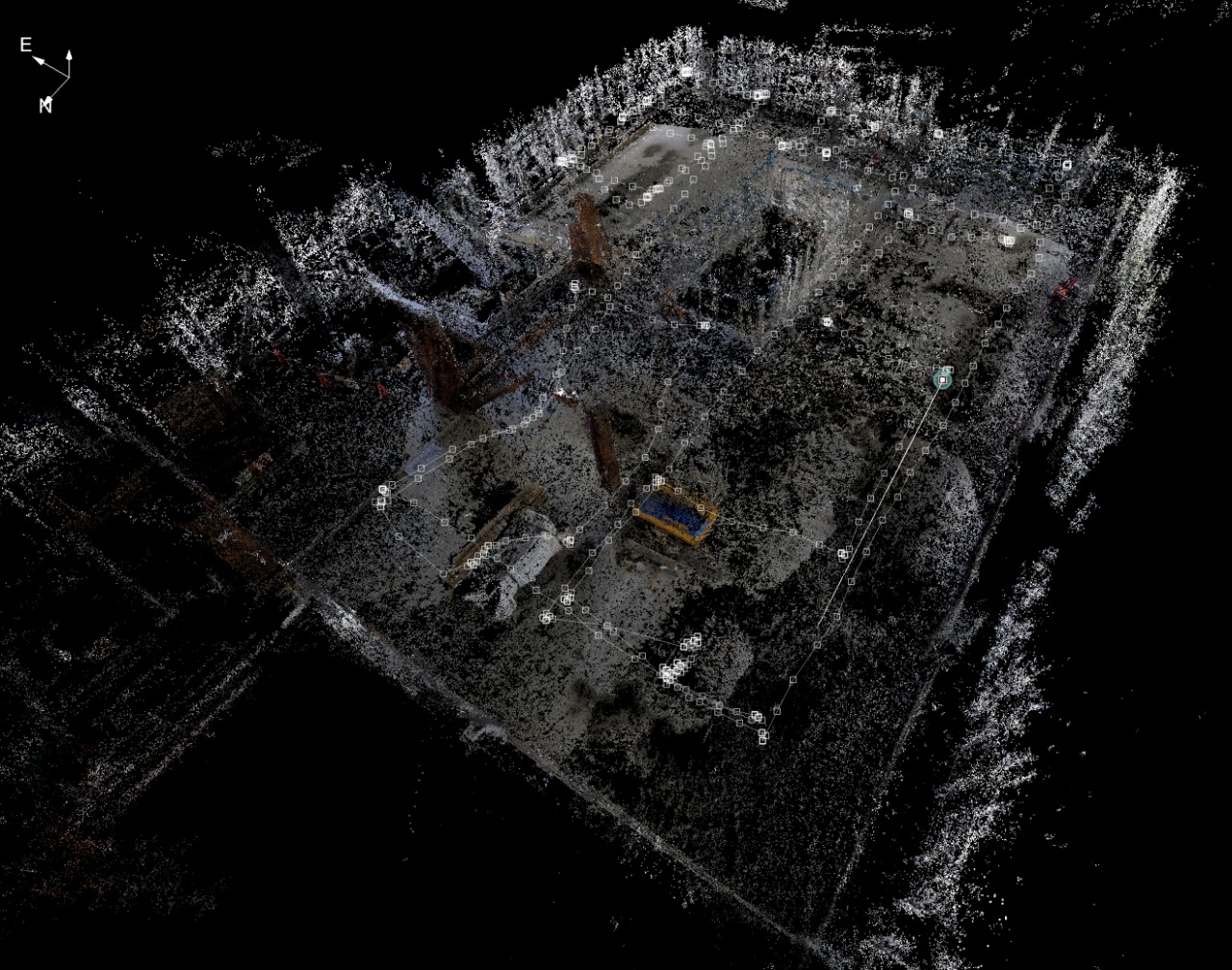
ドローンの画像から生成された3D点群。その中に飛行軌跡と撮影点を自動配置したもの
障害物の多い屋内現場で、ドローンを自律飛行させて写真や3D点群が自動的に取得できると、進捗管理や安全管理、工事写真の整理、そして施工に伴って少しずつ変わる現場の状況を、施工BIMモデルに反映する作業なども、テレワークでもできそうですね。
屋内や地下でドローンを自律飛行させた例としては、竹中工務店らがBIM(ビルディング・インフォメーション・モデリング)モデルとドローンを連携させて行った「屋内外自律飛行システム」(2021年7月28日付の当ブログ記事参照)や、ブルーイノベーションの原発点検用ドローン「ELIOS 2 RAD」(2021年10月29日付の当ブログ記事参照)、鹿島のトンネル点検システム(2021年10月27日付の当ブログ記事参照)などがあります。
iPhoneなどスマートフォンに使われている超小型LiDAR(3Dスキャナー)の精度や性能もますます高まる今日このごろ、屋内空間でのドローン自律飛行の技術は、これからも進化していきそうです。