管理人のイエイリです。
段差や障害物などが多い工事現場の写真を自動的に撮影して回る手段としては、四足歩行ロボットやクローラー付きロボットのほか、ドローンも有力な手段です。
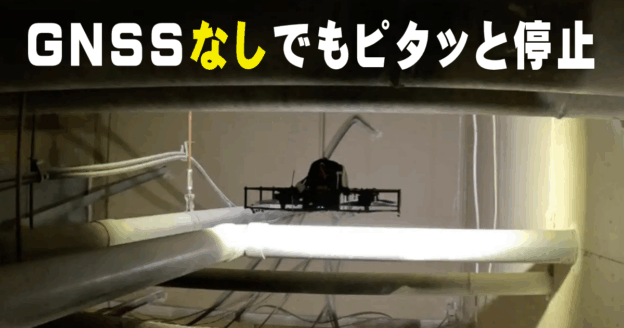
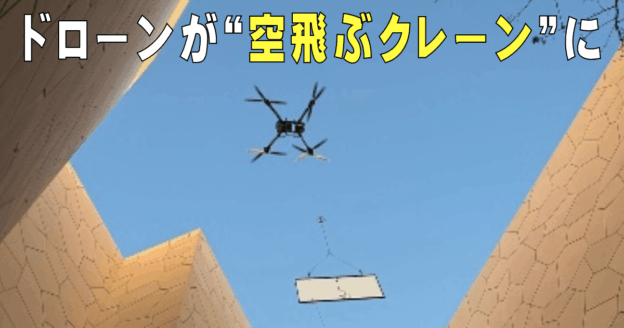
竹中工務店は先日、自社の工事現場で屋外からドローンを進入させて、現場内部の写真を撮影する実験に成功しました。

屋外から建物内部に進入するドローン(以下の写真、資料:竹中工務店)

建物内部の階段を2階から1階へと飛行するドローン
こうした難しい飛行はどんな熟練パイロットならできるのだろうと思ってしまいますよね。
実はドローンが飛行したルートは、
ナ、ナ、ナ、ナント、
BIMモデル上で事前に設定
され、ドローンはそのルートに従って自動飛行していたのです。(竹中工務店のプレスリリースはこちら)
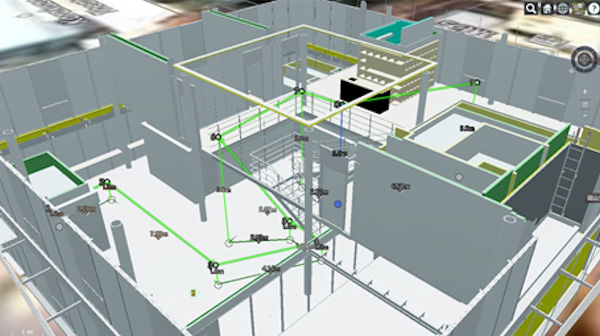
BIMモデル上であらかじめ設定された飛行ルートと写真撮影の対象物
この飛行は、竹中工務店が建機レンタル会社のカナモト(本社:北海道札幌市)、アクティオ(本社:東京都中央区)とともに、BIM(ビルディング・インフォメーション・モデリング)を用いたドローンの「屋内外自律飛行システム」の実証実験として行ったものです。
国土交通省が推進するi-Constructionでも、ドローンの自動飛行・自動撮影は広く行われていますが、屋外での位置計測には人工衛星からの電波で位置を計測するGNSS(全地球測位システム)を使っています。
一方、屋内ではGNSSによる測位が使えません。そのため、これまではカメラ映像を分析して飛行用の地図を作りながら飛行する「SLAM(Simultaneous Localization and Mapping)」という方法によって、ドローンの自己位置を推定しながら飛んでいました。
しかし、日々刻々と状況が変化する工事現場では、地図作りの目印となるマーカーを設置したり、地図作成自体が難しかったりしたため、ドローンの屋内自律飛行の障害になっていたのです。
そこで、今回の実験では「BIMを用いた離陸・経路・着陸地点の飛行ルートを設定」と、「BIMだけで飛行経路と閲覧対象を設定」という条件で、ドローンの屋内自律飛行を行った結果、屋内での自律飛行精度が確保できることを確認しました。
実験に使用したドローンはACSL(本社:東京都江戸川区)の「ACSL Mini」という機種で、自律飛行システムにはセンシンロボテックス(本社:東京都渋谷区)の「SENSYN CORE」を使いました。

実験に使用したドローン「ACSL Mini」
この実験が成功したことで、現場でドローンの飛行を行ってきた
パイロットをテレワーク化
することも可能になりそうですね。
また、施工管理者も現場の安全巡回や現地の細部確認を事務所内の自席やテレワークで行うことができるようになり、「現場へ移動のムダ削減」で生産性向上に役立ちそうです。
竹中工務店では、カナモト、アクティオと今後も現場での屋内外自律飛行の試験運用を重ね、利便性向上の追加開発を進めるとともに、開発中のロボットプラットフォームを使ってドローンとロボット連携も進めていく方針です。
BIMが人間とロボットの間のコミュニケーションツールとして、使われ始めたことも見逃せませんね。