管理人のイエイリです。
電柱や標識などのインフラ点検作業は、点検員が現場で1本ずつ確認し、台帳に記録していくという方法が一般的です。
しかし、このやり方では点検作業の大部分は移動時間となり、台帳更新も手作業のため、DXが進む他業種と比べても非効率さが目立ってきました。
そこで、ドライブレコーダーやスマートフォンをクルマに搭載し、その映像で点検する方法も注目されていますが、“丸腰”のGNSSでは位置誤差が1~10m程度と大きいため、撮影した電柱が点検台帳のどの電柱なのかを正確に特定できないという課題がありました。
この不便を解消する技術を、このほどNTT(本社:東京都千代田区)が開発しました。
一般的なGNSS付きドライブレコーダーで撮影した映像だけで、電柱などのインフラ設備の位置を、
ナ、ナ、ナ、ナント、
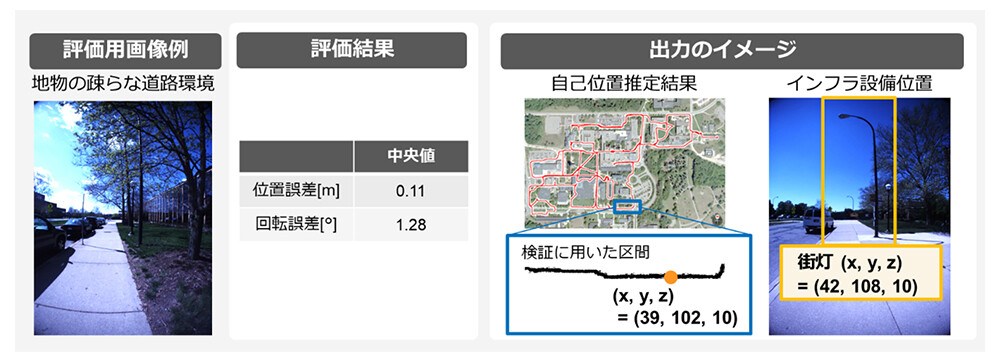
10cm級精度で推定
できる技術なのです。(NTTのプレスリリースはこちら)
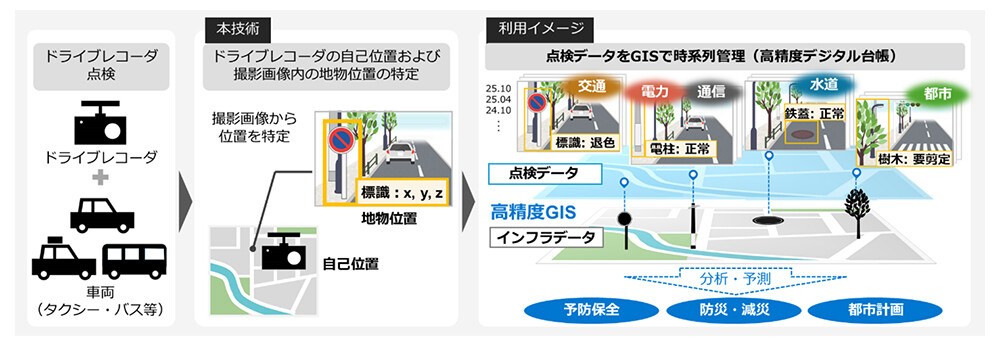
普通のドラレコ映像から高精度に位置を推定し、インフラ点検に活用するイメージ(以下の資料:NTT)
この技術の仕組みはシンプルでありながら、なかなかうまく考えられています。
まず、RTK-GNSSなどを搭載した高精度のMMS(モバイルマッピングシステム)で道路周辺を計測して、電柱などの位置を記録した高精度の「参照3Dデータ」(デジタル台帳の元となるデータ)を用意しておきます。
次に、日々の点検作業では、普通のGNSS付きドラレコで道路周辺の映像を撮影し、その映像から「点検3Dデータ」を作成します。
そして点検3Dデータを、参照3Dデータと比較して、現場の形や色などを使って重ね合わせることで、ドラレコ側の位置誤差を補正し、10cm級の設備位置を割り出す仕組みです。
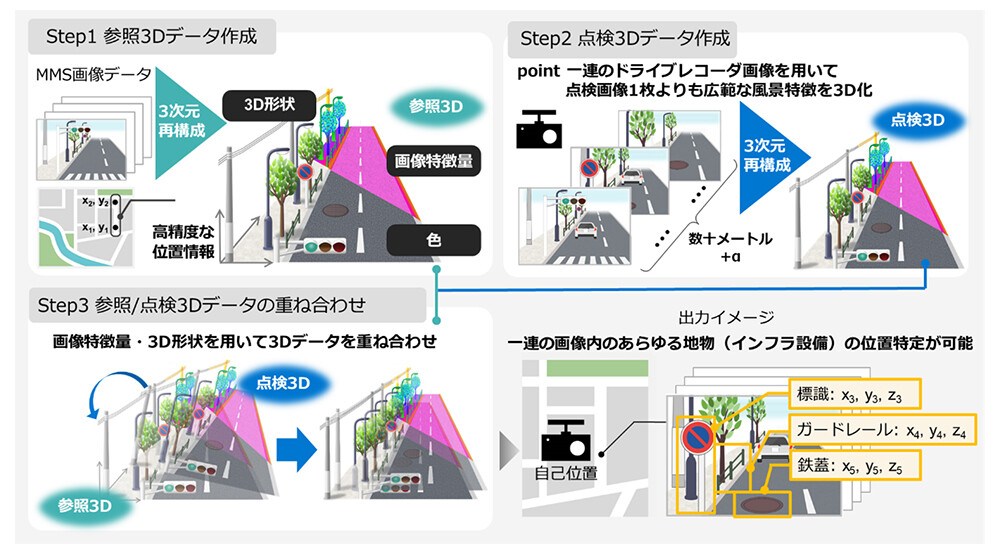
普通のドラレコ映像をもとに高精度の位置推定を行う仕組み
映像を使って位置合わせをするとき、映像に特徴点が少ない場合はマッチングが難しい場合もありますが、この技術では「画像特徴量」という情報も加味することで、安定してマッチングできるよう工夫されています。
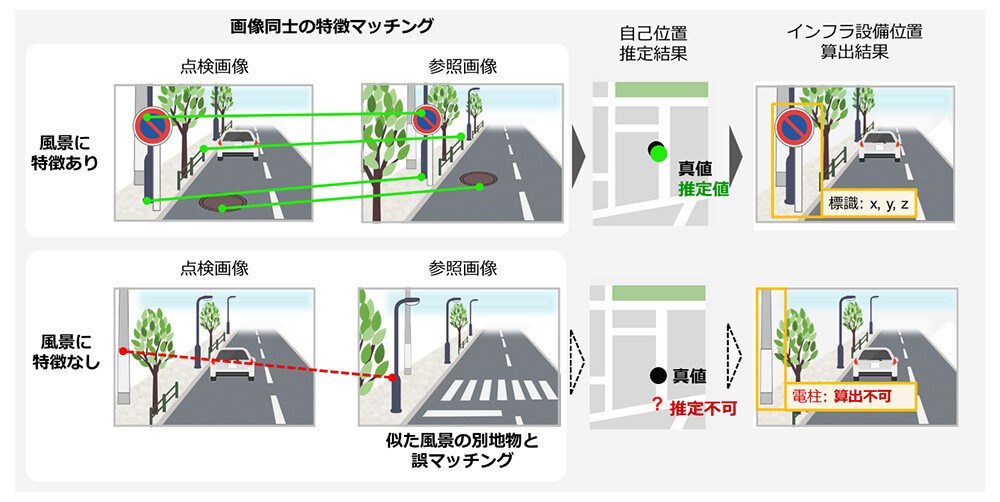
風景に特徴がある場合は映像のマッチングがしやすい(上段)が、特徴がない場合は誤マッチングが起こる場合もある(下段)
画像特徴量という情報を使うことで、同じような景色の現場でも高精度に位置を特定できる
この技術が実用化されると、普通のクルマに搭載されたドラレコで撮影された映像によって、
台帳を自動更新
できるようになるのです。
作業員はこれまでのように、電柱などを一つひとつ見て回る必要がなく、ドラレコの付いたクルマで定期的に街なかを走行するだけでよくなるのです。
オフィスに戻ってから映像を解析し、劣化のある電柱を抽出して補修計画を立てるという“デスクワーク型点検”が可能になります。
現地へ行くのは補修が必要な箇所だけとなり、大幅な省人化と働き方改革につながります。
今後は、AI(人工知能)による自動劣化診断や、国土交通省の3D都市モデル「PLATEAU」との連携など、都市管理のデジタルツイン化などの応用も期待できそうですね。