管理人のイエイリです。
災害復旧現場などでの重機作業に使われる無人化施工は、これまで別の場所にいるオペレーターが運転席や中継車などに設置した複数のカメラから送られてくる映像を見ながら、重機を遠隔操作していました。
これらの映像は、平面のモニターに表示されるため、バックホーのバケット位置などを確認するためには複数のモニター画面を見比べながら操作する必要がありました。そのため、作業効率が悪かったのも事実です。
そこで大成建設は、遠隔地にいるオペレーターが実際に重機に乗っているような感覚で操縦できる臨場型映像システム「T-iROBO Remote Viewer」を開発しました。
重機の運転席に取り付けられたステレオカメラから、リアルタイムに送られてくる3D映像を、
ナ、ナ、ナ、ナント、
ヘッドマウントディスプレー
で見ながら、操縦する方式なのです。

臨場型映像システム「T-iROBO Remote Viewer」を搭載した重機とヘッドマウントディスプレーを着けたオペレーター(以下の写真、資料:大成建設)
重機の運転席には左右に並べて2台の魚眼カメラが搭載されており、それぞれ前方を約220度の視野で撮影します。
その映像をリアルタイムにオペレーターのいる場所まで中継し、オペレーターがかぶったヘッドマウントディスプレー(HMD)にステレオ表示する仕組みです。

重機の運転席に取り付けられた2台の魚眼カメラ
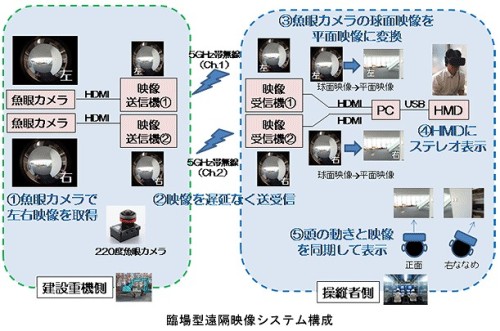
臨場型遠隔映像システムの仕組み
オペレーターが見たい方向に顔を動かせば、HMDに表示される映像も連動して移動します。
また、立体映像で奥行きや距離感などを実感できるので、重機のアタッチメントを
スムーズに正確な位置に移動
させることができます。
これまでは災害時などに複数のカメラを現場に設置するのに時間がかかっていましたが、このシステムを使うと重機が現場に到着するとすぐに作業を始めることができます。
災害現場をドローンで撮影し、3Dモデルを作ると重機が現場に到着するまでの間、オペレーターが作業をイメージトレーニングするのにも使えそうですね。
大成建設は災害復旧工事だけでなく、多くの建築・土木工事のこのシステムを導入し、安全で効率的な作業が行えるように機能や操作性などの向上を図り、普及を進めていく予定とのことです。