管理人のイエイリです。
バックホーで土砂をすくい、ダンプトラックに積み込む作業は、トンネルや道路、建築基礎など土を扱う工事にはつきものです。
土をすくってからこぼさずにダンプの荷台に積み込むまでには、バックホーのアームやブーム、バケットを巧みに操る必要があり、熟練技能を要します。
しかし、人手不足が深刻化している今、このような単純作業はできれば自動化し、貴重な熟練オペレーターはもっと専門的な作業を行ってもらいたいですね。
そこで大林組、日本電気(以下、NEC)、大裕(本社:大阪府寝屋川市)は、「バックホー自律運転システム」を開発しました。
バックホーで土砂の山から土をすくい取り、旋回してダンプの荷台に載せるまでを、
ナ、ナ、ナ、ナント、
完全自動化
してしまったのです。(大林組のプレスリリースはこちら)

土砂の山から土をすくい取るバックホー(以下の写真、資料:大林組)

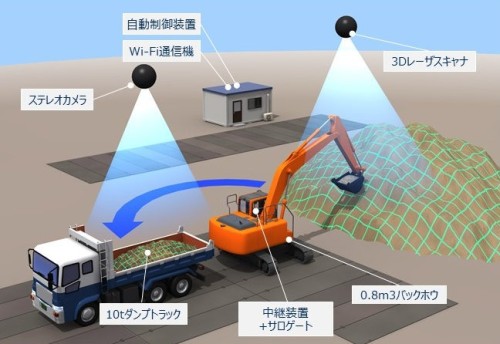
バックホーの運転席には、大林組と大裕が共同開発した汎用遠隔操縦装置「サロゲート」が取り付けられています。これまでは、別の場所にいるオペレーターがバックホーを遠隔操作するという方法で使われていました。
そのサロゲートを、バックホーの動特性や応答遅延を考慮して制御を行うNECの「適応予測制御技術」や、ベテランオペレーターの操縦ノウハウをAI(人工知能)に学習させたシステムが自動運転するようにしたのです。

土をすくう作業を効率化するため、山の状況を3Dスキャナーで計測し、1回にバケットにすくえる土砂の量が最大になる掘削位置を判断。そこを狙ってバケットを突っ込みます。

実際の土砂の山
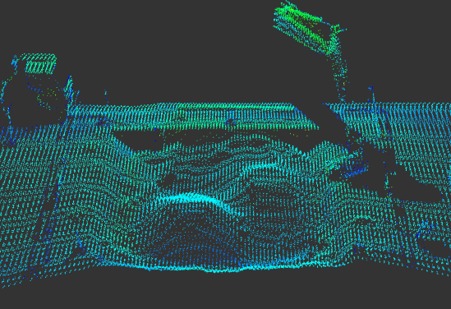
3Dスキャナーで計測
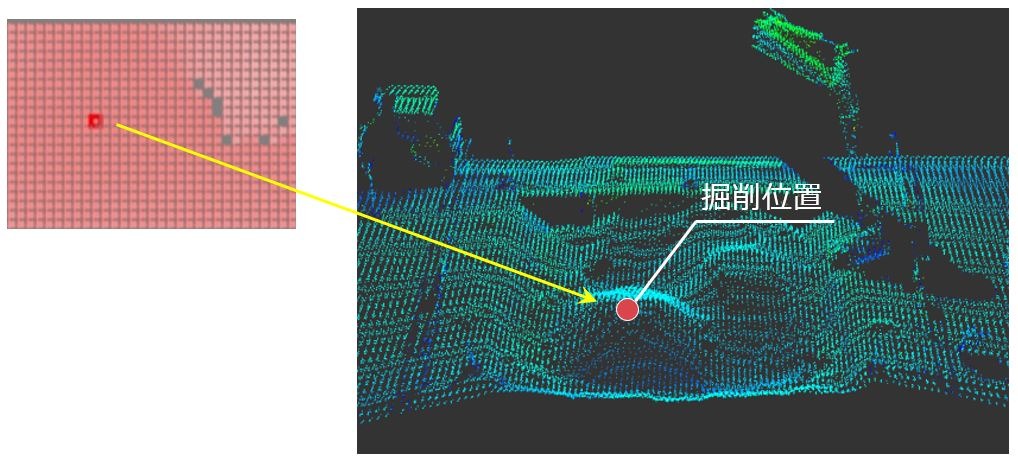
1回にバケットにすくえる土砂の量が最大になる掘削位置を決める
YouTubeに公開されている動画「バックホウ自律運転システム」を見ると、土をバケットですくった後、こぼれないようにバケットを小刻みに
ブルブルと振動
振動させて、旋回時などに土がこぼれないようにする細かい動作も行っていました。
そして、積み込んだ土砂がダンプの規定重量に達したときは、自動的に停止し、次のダンプが入ってくるまで待機します。

「バックホー自律運転システム」を使った現場の全景
大林組らは今回、開発したシステムを建設機械の「自律化第1弾」と位置づけており、2019年12月に大林組の土木工事現場に導入する予定です。
動画を見ると、ベテランオペレーターが掘削、積み込み作業を行う場合に比べて、動作はかなりゆっくりした感じです。しかし、今後、次世代通信技術「5G」を使えるようになると、見違えるようにスピードアップするに違いありませんね。