管理人のイエイリです。
現場に設置された定点カメラの映像は、現場で何が行われているのかくらいはわかりますが、定量的な施工管理には使えませんでした。
そこで安藤ハザマは、日本マルチメディア・イクイップメント(本社:東京都千代田区)、富士ソフト(本社:横浜市中区)、計測ネットサービス(本社:東京都北区)、宮城大学事業構想学群教授の蒔苗耕司氏と共同で、建設現場の進捗(ちょく)管理を効率的に行うための「定点カメラ映像による進捗管理システム」を開発しました。
このシステムを使うと、現場に設置した4Kカメラからのリアルタイム映像から、様々な定量的な管理が行えます。
例えば、リアルタイムな映像を瞬時に擬似的な3D映像に変換して、
ナ、ナ、ナ、ナント、
CIMモデルに重ねて表示
することで、工事の完成形に対する現在の進ちょく状況が直感的にわかるのです。(安藤ハザマのプレスリリースはこちら)
また、振動ローラーがその日、締め固め作業を行ったときのGNSS(全地球測位システム)の軌跡データや、地盤改良に使う深層混合処理を行う重機の施工データも、定点カメラの映像に重ね合わせて見ることができます。

定点カメラの映像にCIMモデルを重ねた合わせたところ。1mごとの等高線に対して、工事が予定通り進行しているのかを確認できる(以下の資料:映像進捗管理システム開発コンソーシアム)

振動ローラーが午前中に締め固めた範囲を青色で表示したところ。画面右側には定量的な盛り土量も表示されているので、定量的な管理が行える
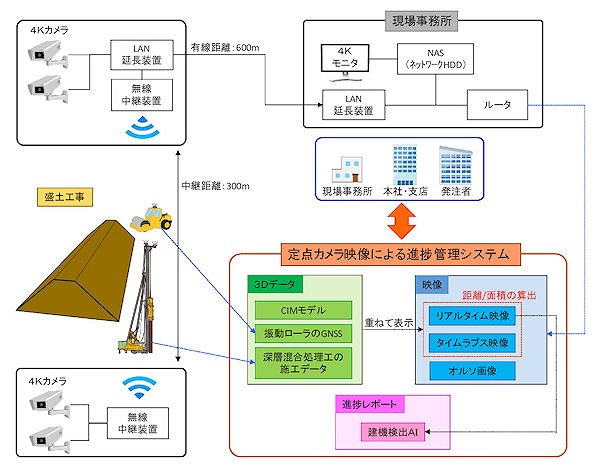
システム構成図。現場に設置した4Kカメラのリアルタイム映像に、CIMモデルや施工データを重ねて表示できる
また、パソコン画面を直接タッチすることで、映像から距離や面積を算出する機能も付いています。日々の出来高を管理したり、資機材配置計画など、簡単な測量が画面で行えるので便利ですね。

パソコンの画面上でちょっとした測量や計測もできる
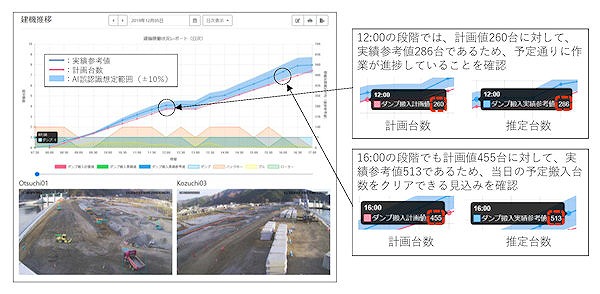
システムにはAI(人工知能)によって建機を識別する機能も付いています。ダンプやバックホー、ブルドーザー、振動ローラーを自動的に識別し、進ちょくレポートで表示します。
例えば、ダンプが何台通ったかを30分ごとの時系列グラフで表示し、施工中に工事の遅れなどをすぐに知ることができます。
カメラからの距離が150mの場合、80%程度の認識率があるそうです。バックホーやダンプなどは、普通のクルマと違って可動部が多く、形が変わるのでAIによる認識が難しいのですが、なかなか高い精度でのようですね。

AIによるダンプやバックホー、ブルドーザーなどの自動認識結果
さらに、現場を囲むように高所に設置した4台の定点カメラの映像から、
オルソ画像を自動作成
し、現場の平面図と重ねて見ることもできます。(オルソ画像=現場を真上から見下ろした、地図のような映像のこと)
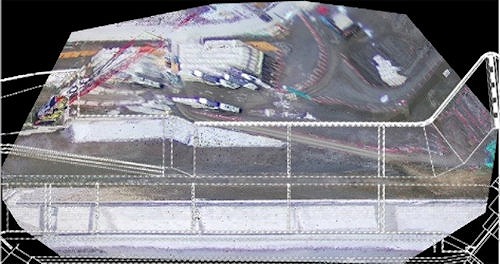
4台の4Kカメラの映像から自動作成されたオルソ画像
安藤ハザマらは、官民研究開発投資拡大プログラム(PRISM)の適用を受けて「映像進捗管理システム開発コンソーシアム」を構成し、東日本大震災の津波で大きな被害を受けた岩手県大槌町の海抜14.5mの防潮堤建設現場で、このシステムを試用しています。
現場のオルソ画像は、同コンソーシアムの「ライブオルソサイト」で公開し、毎日更新されています。

ライブオルソサイトに掲載された最新のオルソ映像
このシステムによって、現場事務所のパソコンで工事の進ちょくをリアルタイムに把握できるようになったため、施工管理技術者が現場に立ち会う回数や時間が削減されたほか、現場で行っていた距離や面積の測量も大幅に削減されたそうです。
その結果、現場をちょっと止めて作業する時間も減り、生産性が向上したとのことです。現場でのちょっとした「移動のムダ」をなくすことは、重要ですね。