管理人のイエイリです。
昔の戦争映画を見ていると、艦隊や戦車などの模型を大きな地図の上に置いて、どのように全体を動かしていけば敵を攻略できるかという「図上演習」を行っている場面が時々、登場します。
これと同じく、複数の重機を同時に動かして、地盤を造成する工事を効率的に行うためには、できるだけ建機のムダな動きをなくすように、緻密な施工計画を立てることが重要です。
そこで前田建設工業では「自動施工計画システム」を開発し、現場のBIM/CIMデータ上で、重機の効率的な動きをVR(バーチャルリアリティー)によってシミュレーションし、作業内容を具体化した「作業計画モデル」を自動生成できるようにしました。
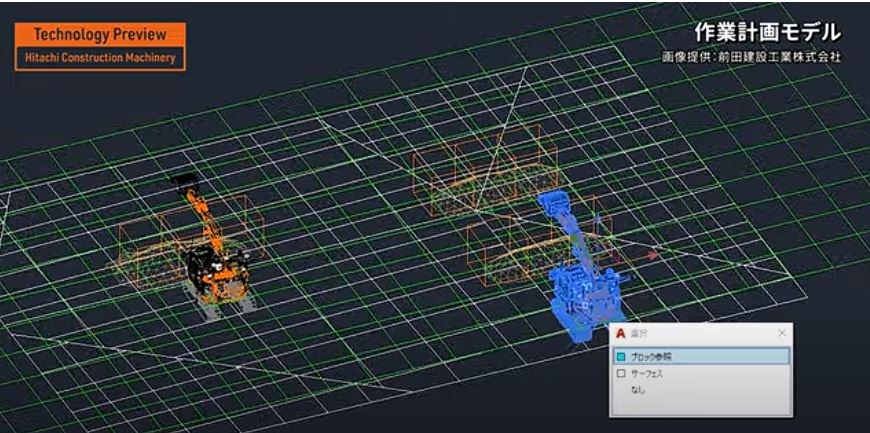
BIM/CIMモデル上で効率的な重機の動きを具体化した「作業計画モデル」を作成できる「自動施工計画システム」(資料:前田建設工業)
次に重要なのは、この計画通りに実物の重機を動かして、効率的に施工することです。そこで前田建設工業とロボットベンチャー企業のイクシス(本社:神奈川県川崎市)は、「自動施工管理システム」を開発しました。
作業計画モデルに従って、
ナ、ナ、ナ、ナント、
実物の“建機軍団”
に指令を出し、整然と作業させるシステムなのです。(イクシスのプレスリリースはこちら)
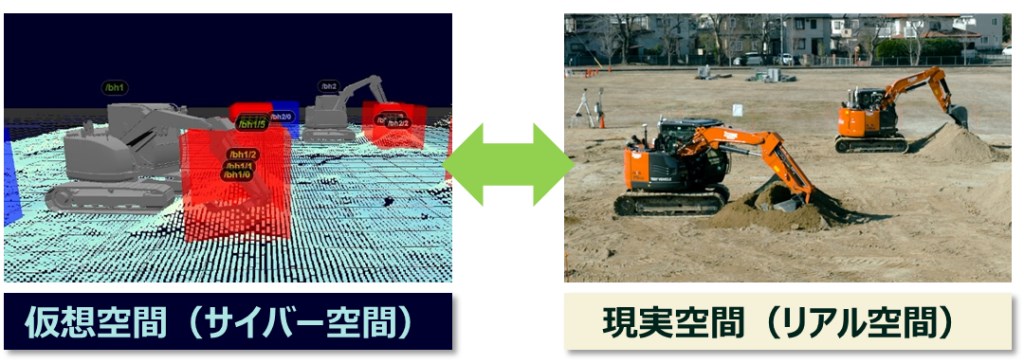
仮想空間(左)でシミュレーションした重機群の動き通りに、現実空間(右)の重機を制御するイメージ(資料:イクシス)

「自動施工管理システム」からの指令に従い、現場で整然と動く油圧ショベル(写真:イクシス)
このシステムによって、重機施工の計画→指示・管理→実行までの一元管理が可能になります。
つまり、BIM/CIM データである仮想空間(サイバー空間)で作成した施工計画を、実現場である現実空間(フィジカル空間)で実現する「デジタルツイン施工システム」というわけですね。
このシステムは2023年11月14日から2024年3月21日まで、前田建設 ICI総合センター(茨城県取手市寺田5270)で、日立建機の油圧ショベルを使って実証実験を行い、実用性を確認しました。
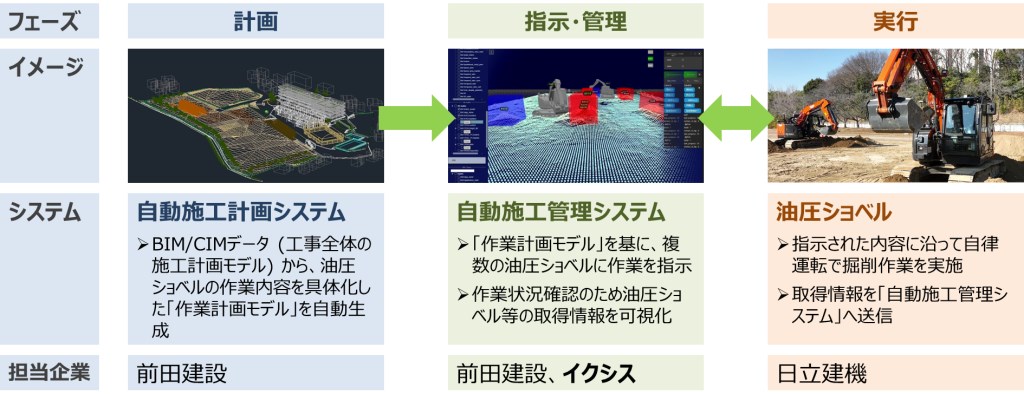
実証実験の流れと担当企業(資料:イクシス)
BIM/CIM上で重機の作業計画を作ると言っても、アームやバケットの動きの一挙手一投足まで計画するわけではありません。
そこで日立建機が開発した「ZCORE」を活用し、施工現場でオペレーターが作業時に行っている「認識・判断・実行」を、
油圧ショベルが自律的に
行えるようにしました。
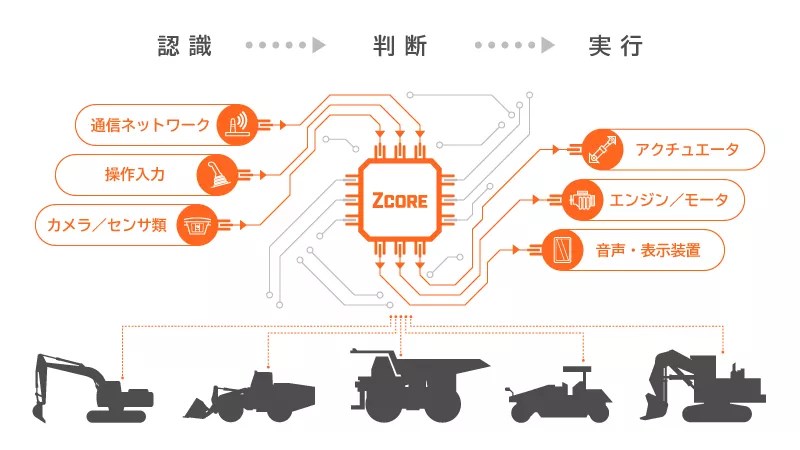
油圧ショベルの細かな作業を自律的に行える「ZCORE」の概念図(資料:日立建機)
この自動施工管理システムは、遠隔操作でも使えます。将来は少人数のオペレーターが重機軍団の司令官や参謀となり、遠隔で指揮しながら効率的な作業が行えるようになりそうですね。

自律運転油圧ショベルを遠隔操作する様子(写真:イクシス)