工事現場で活躍するアーティキュレートダンプは、関節式の車体構造によって狭い道や急カーブでも自在に走行できる大型の運搬車です。トンネル現場では、坑内でUターンすることも可能です。
これを自動運転化すると、オペレーターの負担軽減や安全性の向上に加え、現場全体の効率化につながります。

しかし、大型車両ゆえの複雑な操舵や停止制御が課題でした。
こうした中、熊谷組が開発に取り組んでいるのが「次世代AI仮想信号式制御システム」という新しい仕組みです。自動運転をより確実に、かつシンプルに実現するために考案されたのです。
その方法とは、
ナ、ナ、ナ、ナント、
現場に”見えない信号”
を設置することなのです。(熊谷組のプレスリリースはこちら)
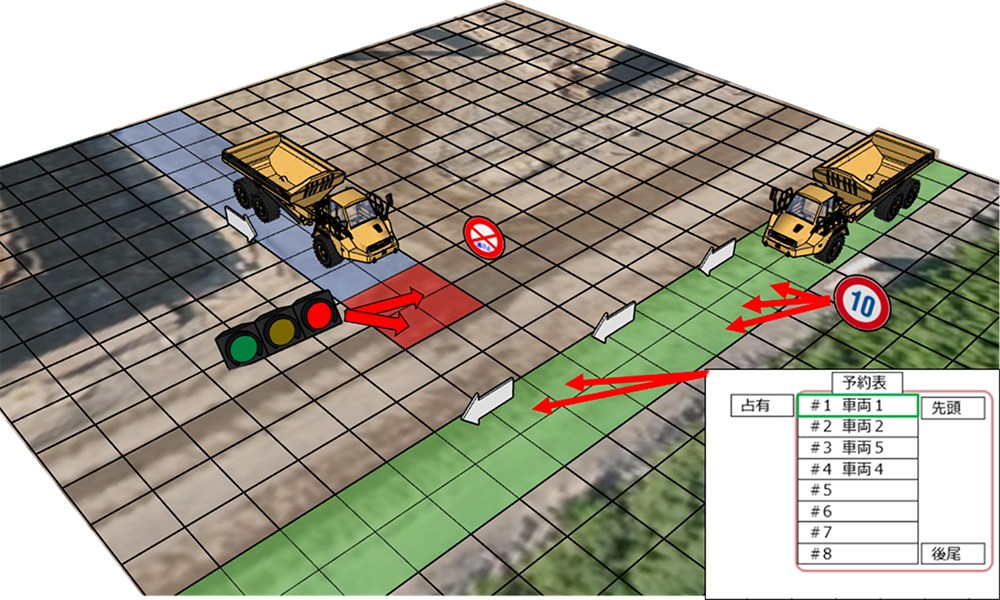
“見えない信号”による複数のアーティキュレートダンプの自動走行イメージ
この見えない信号とは、実際の交通信号機のようにポールや信号ランプのような設備を用意するのではなく、目に見えない信号をデジタル空間に置くものです。
仮想的に設定した停止ラインに近づいた車両に対し、進行や停止の命令を送ります。自動運転の車両は、その指示に従って進行や停止の判断を行います。そのため、センサーや測位技術と組み合わせることで、運転者がいなくても正確に走行制御できます。
熊谷組がこれまで開発していた自動走行システムは、すべての走行経路と車両の位置をAIによって解析し、時間的に最もムダのない運行制御を行うものでした。しかし、走行経路の複雑化や車両台数の増加で計算量が膨大になってしまうことが課題でした。
そこで、古典的な
古典的な信号機を仮想化
するという方法に行き着いたというわけです。
熊谷組は2025年4月に、同社の施工現場でアーティキュレートダンプの自動走行実験を行い、直線や楕円、八の字などの経路に対する追従性を確認したほか、オペレーターが遠隔操作で描いた経路を記録し、自動走行する実験も行いました。
その結果、自動運転ダンプは安定的に動作し、設定された停止ラインから30cmの横ずれで停止するという、精度の高さも確認しました。

遠隔操作を行うオペレーター

自動運転による八の字走行
今後はアーティキュレートダンプ以外に、複数の重機で協調運転を実現し、トンネル現場やダム現場まで幅広い工事現場での活用を図っていきます
国土交通省が推進する「i-Construction 2.0」で目指す「建設現場のオートメーション化」に向けて、また一歩、前進したようですね。