管理人のイエイリです。
トンネル内や高架下、地下空間などの建設現場では、GNSS(衛星測位システム)の電波が届かないことがよくあります。
こうした場所では、バックホーなどの運転室でオペレーターが設計図と掘削用のバケット位置をリアルタイムに確認できる「マシンガイダンス」システムを使うのが難しく、施工効率の向上や出来形精度の管理が課題となっていました。

トンネル内でのバックホーによる施工イメージ。GNSSの電波が届かないので一般のマシンガイダンスシステムが使いにくい(以下の写真、資料:鉄建建設)
しかし、そんな“GNSSブラックゾーン”でのICT施工を広げる新技術を鉄建建設、CalTa(本社:東京都港区)、マップフォー(本社:愛知県名古屋市)が開発しました。
その正体は、
ナ、ナ、ナ、ナント、
LiDAR式マシンガイダンス
なのです。(鉄建建設のプレスリリースはこちら)
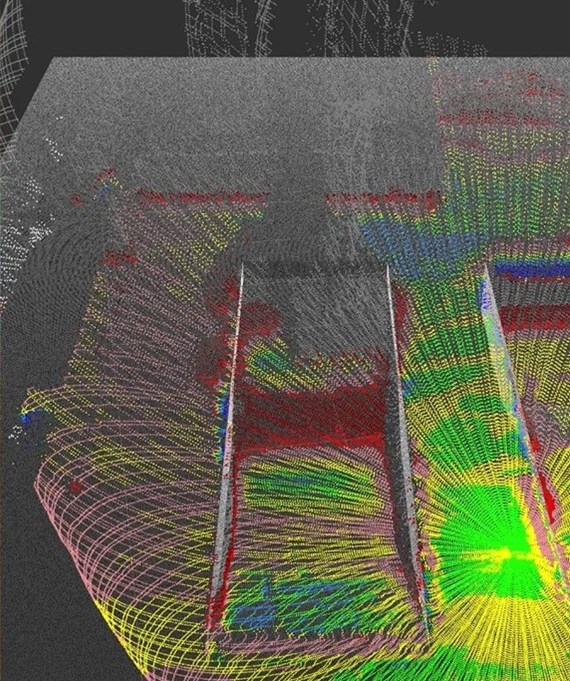
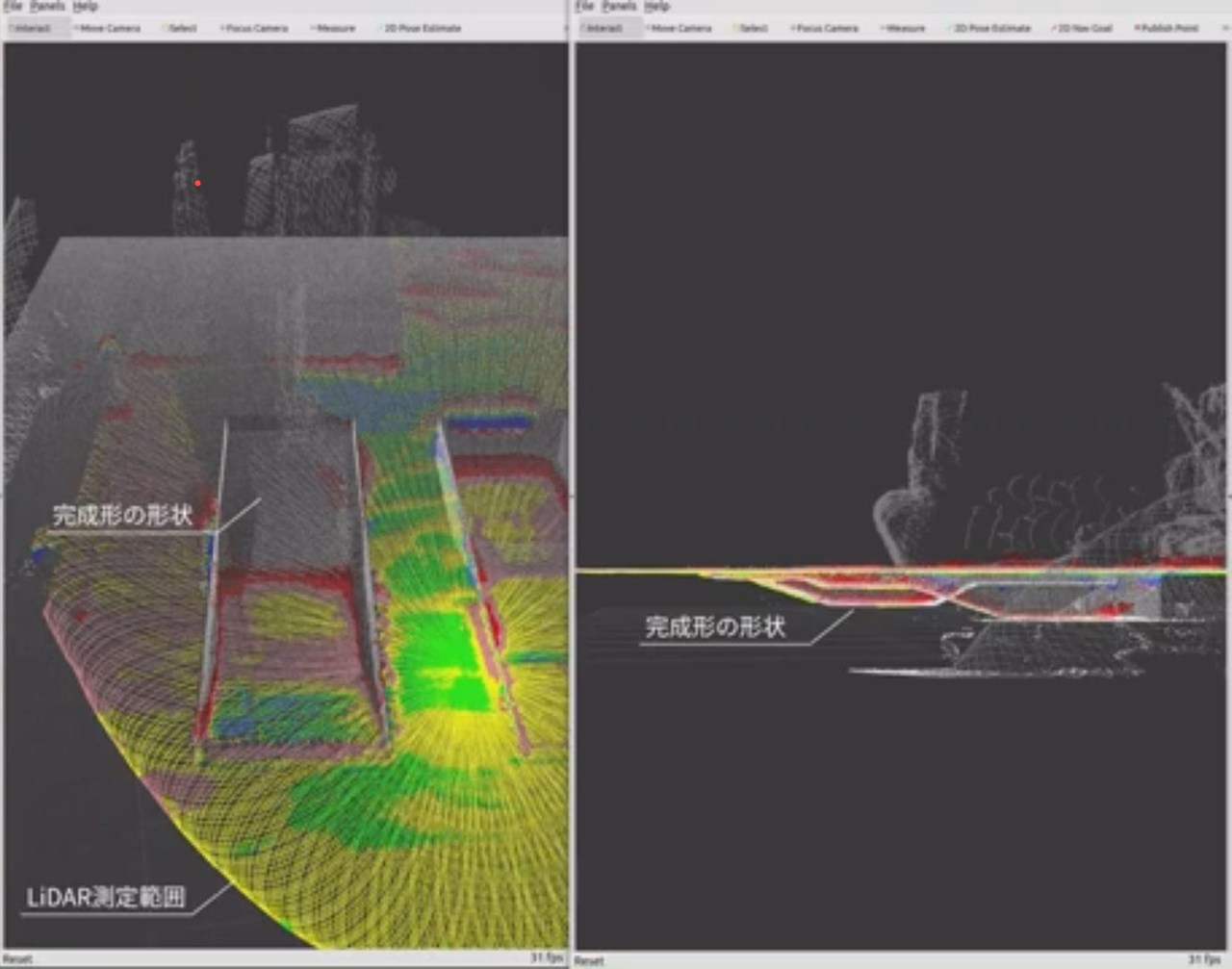
上写真の現場で、設計図と現在の掘削状況をリアルタイムにヒートマップ表示した画面
このシステムでは、撮影用のカメラと可搬式LiDARが一体となった「エッジシステム」という装置と、独自開発の建機位置検出システムにより、現場の掘削状況をリアルタイムで計測します。
LiDARが現場の点群データを取得し、カメラ映像と組み合わせて、施工状況を3次元で可視化します。その点群を完成形状データと比較して、設計との差分を「ヒートマップ」として運転席のモニターに表示します。
オペレーターはこのヒートマップを見ながら、完成形状を目指して掘削すればよいのです。
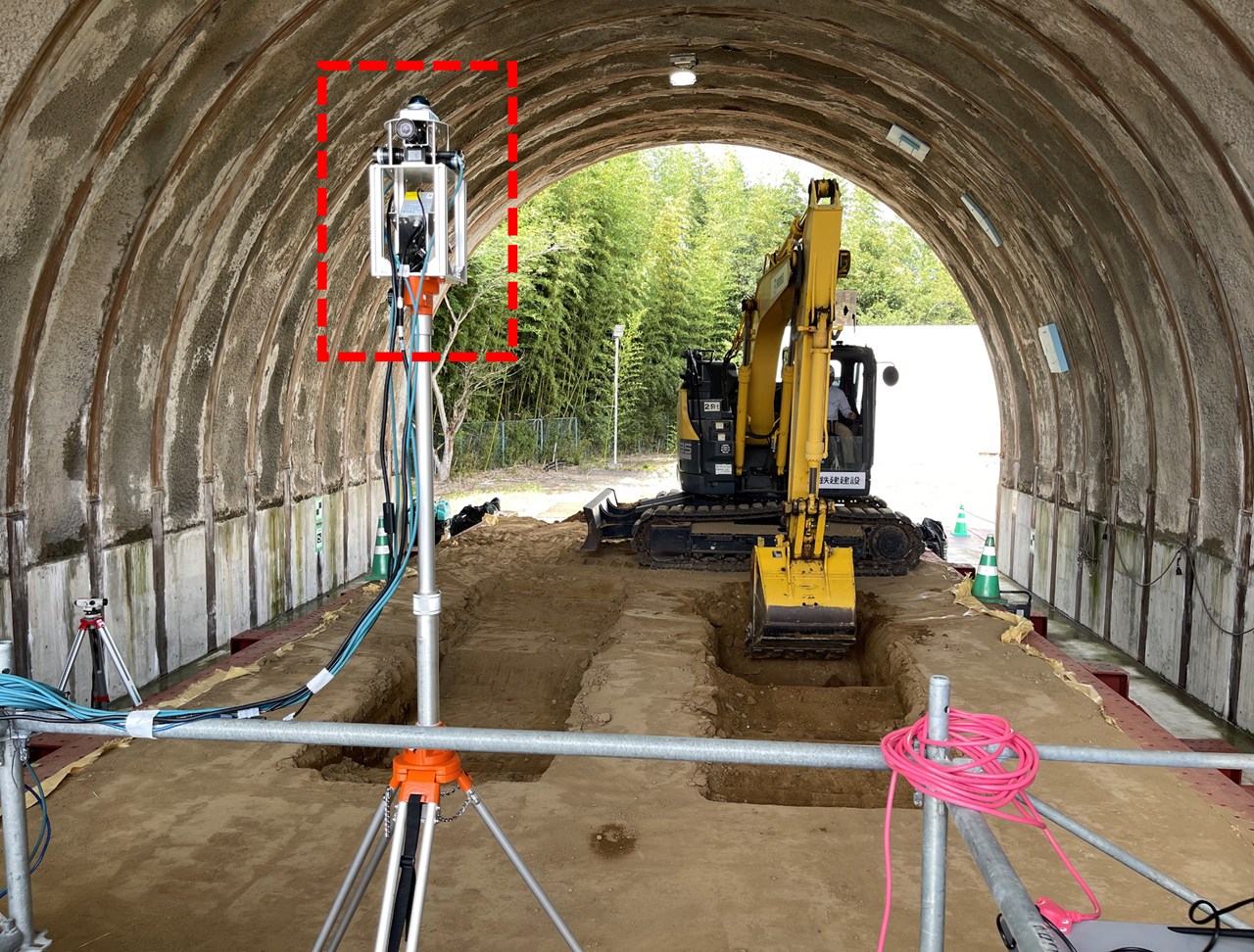
現地に設置した撮影カメラと可搬式LiDARが一体となった「エッジシステム」の装置(点線部)

運転席内のモニターに表示されたリアルタイムのヒートマップや断面図
ヒートマップの拡大図
公共座標系と位置データを合わせるため、エッジシステム周辺には座標データ付きのARマーカーを複数配置します。それをエッジシステムが読み取り、エッジシステムの自己位置を高精度に認識。さらに、重機位置を3次元的に表示できます。
LiDARによるヒートマップは、
1cm単位で表示
されるため、高精度の施工が実現します。
鉄建建設は、特殊なセンサー類を装備していない一般のバックホー(0.45m3)を使って非GNSS環境下の模擬トンネル内で実証実験を行ったところ、丁張なしで設計掘削高さに対し平均20mm(余掘り側)程度の精度で掘削することができました。
GNSSが使えない屋内の現場などでロボットによる施工を行うためには、位置計測をどのように行うのかが課題になっています。
LiDARによるマシンガイダンスシステムは、トンネル内での掘削はもちろん、狭小空間や既設構造物に接近したロボット作業にも活用が広がり、施工の自動化や遠隔化を加速しそうです。