中央大学理工学部精密機械工学科中村研究室のメンバーは、その研究成果を事業化しようと、2017年にベンチャー企業、ソラリス(本社:東京都文京区)を設立しました。
その製品の一つが、配管やダクトの内部を点検・清掃するミミズ型ロボットです。

配管用(左)とダクト用(右)のミミズ型ロボット(以下の写真、資料:ソラリス)
これらのロボットは、内径18mm以上の配管内部を自走しながら映像を撮影したり、配管をブラシで清掃したりする機能を持っています。
写真を見るとクローラーやタイヤなどは見当たりませんが、その“走行装置”となっているのは、
ナ、ナ、ナ、ナント、
人工筋肉
なのです。(ソラリスのミミズ型ロボット解説ウェブサイトはこちら)

ソラリス型人工筋肉。膨らむと軸方向に縮んで、強力な引っ張り力を発生する
人工筋肉の中心部は空洞となっており、ここに圧縮空気を注入すると膨らみ、軸方向には縮みます。このとき、軸方向に強力な引っ張り力を発生します。
ロボットには多くの人工筋肉が取り付けており、これらを前方から後方に向かって順次、膨らませたり、しぼめたりします。
膨らんだところは管内での「固定点」となり、しぼめたところが軸方向に伸びて前進します。これを繰り返すことで、ミミズのように前進できるのです。
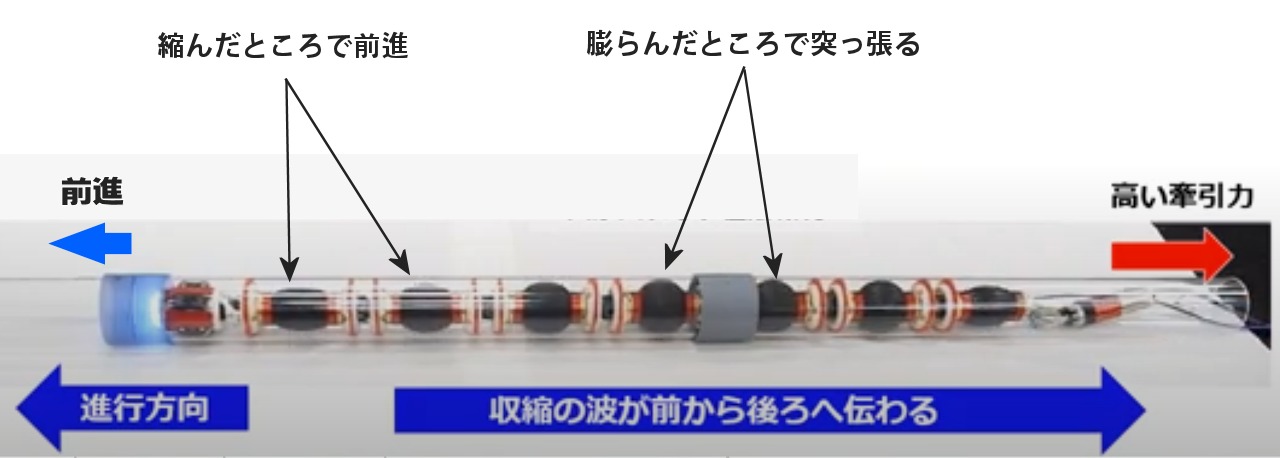
膨らんだところを固定点として、少しずつ前進する原理
人工筋肉の収縮時には、大きな軸力が発生するため、管端から押し込む方法に比べて大きな前進力が発生します。
そのため、急な曲がり部や上り部が連続している管内でも、スムーズに移動できます。
また、中心部が空洞というメリットを生かし、カメラのケーブルやメンテナンス用の機器などを通すこともできます。
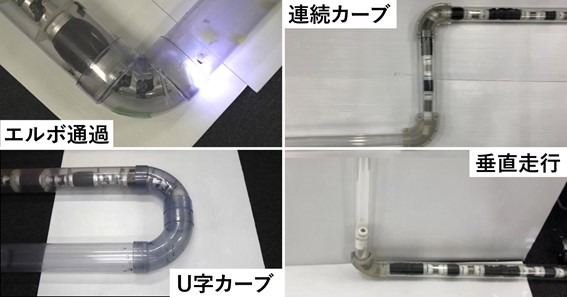
曲がり部が多い配管内部もスムーズに走行できる
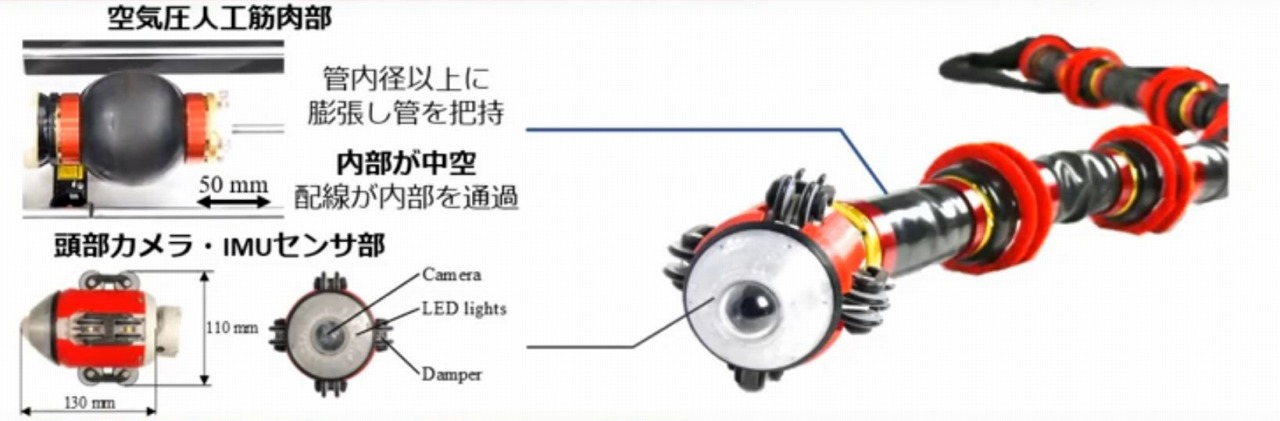
中心部が空洞なので頭部カメラの配線やメンテナンス用の機器などを通しやすい
このロボットの将来性は、ビジネス界からも大きな注目を集めており、同社はこのほど第3回目第三者割当増資を行い、
合計4.1億円の資金調達
に成功しました。(ソラリスのプレスリリースはこちら)
| ●出資の引受先 リアルテックファンド3号投資事業有限責任組合(本社:東京都墨田区)、三菱UFJキャピタル6号投資事業有限責任組合(本社:東京都中央区)、MSIVC2020V投資事業有限責任組合(本社:東京都中央区)、国立研究開発法人科学技術振興機構(本部:埼玉県川口市)、静岡キャピタル8号投資事業有限責任組合(本社:静岡県清水区)、KSP6号 投資事業有限責任組合(本社:神奈川県川崎市) |
同社はこれまでも2.1億円の資金調達を実施しており、今回の調達で累計調達額は6.2億円に上っています。
同社は今回の資金調達を生かして複雑な配管を可視化・点検するミミズ型ロボットを、2022年夏にリリースする予定です。用途はビルや工場、インフラ施設などの配管内の点検・清掃をターゲットにしています。
このほか、人工筋肉を使って腸のように搬送する「ぜん動運動ポンプロボット」の製品化も促進します。固体と液体が混ざった高粘度の資材を混合・輸送するものです。

人工筋肉を使った「ぜん動運動ポンプロボット」
インフラの点検では、ドローン(無人機)の進出がめざましいですが、小口径の配管やダクトを長距離にわたって点検・清掃する分野は、未開拓の分野です。
ソラリスの人工筋肉を使った推進装置は、新たな点検・清掃市場を開拓しそうですね。