管理人のイエイリです。
道路の舗装がはがれて、穴が開いたようになる「ポットホール」は、早期発見が難しく、発生した後は路面の損傷が短期間に進展します。
その結果、走行中にハンドルを取られて重大事故につながる危険があります。そのため、ポットホールの早期発見・早期修繕はとても重要です。

高速道路上にできたポットホールの例(以下の写真、資料:東芝、東芝デジタルソリューションズ)
例えば中日本高速道路(以下、NEXCO中日本)の場合、2019年度には管内の高速道路で約3200カ所のポットホールが確認されています。
現在は、定期巡回するパトロールカーに点検員が乗り込み、緊急補修の必要があるポットホールを目視で確認すると、付近の安全な場所に停車してポットホールの場所まで戻り、写真撮影や道路管制センターの通報、緊急補修といった対応を行っています。
停車場所がない場合は、次のインターチェンジから引き返し、再度、現場に向かうという時間ロスも発生していました。
そこで東芝(本社:東京都港区)と東芝デジタルソリューションズ(本社:神奈川県川崎市)は、ポットホールを走行中のクルマから、
ナ、ナ、ナ、ナント、
リアルタイムに検知
する「路面変状検知AI(人工知能)」の開発に成功したのです。(東芝、東芝デジタルソリューションズのプレスリリースはこちら)

路面変状検知AIを搭載したNEXCO中日本のパトロールカー
両社とNEXCO中日本は、このAIを搭載したパトロールカーで時速80km~100kmで高速道路上を走行した結果、ポットホールの可能性がある箇所をリアルタイムに検知できることを確認しました。
ポットホールなどの変状を発見するAIを開発するためには、膨大な「教師データ」が必要です。これまでは異常がある画像を囲んで塗りつぶすという手作業が必要だったため、1枚の画像を造るのに約1分40秒もかかっていました。
そこで今回は、異常が「あるか、ないか」というシンプルな画像の分け方で教師データを作る東芝独自の方法で、教師データ用画像の作成時間をわずか1秒に短縮することに成功したのです。
教師データ作成の時間が約100分の1に大幅短縮されたというわけですね。
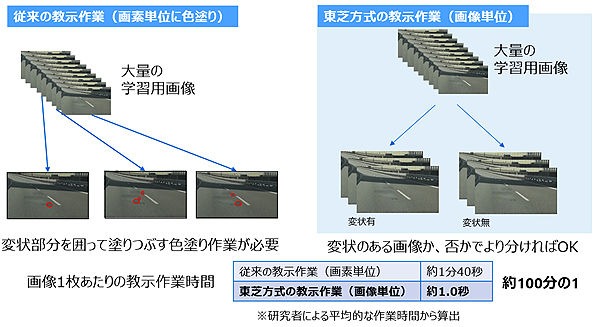
従来の教師データ作成方法(左)だと画像1枚あたり1分40秒かかっていた。それを東芝独自の方法(右)を採用することで、画像1枚の作成時間をわずか1秒に短縮した
また、ポットホールの検知もれや、補修後のご検知があった場合は、東芝独自の追加学習モデルを学習させることで検知精度を改善しました。
その結果、路面外の誤検出が当初、77%もあったのが4%に激減しました。
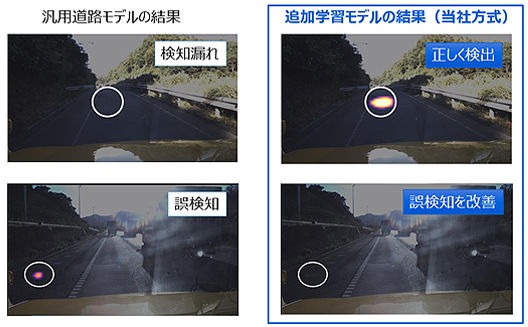
追加学習モデルによる検出精度の改善
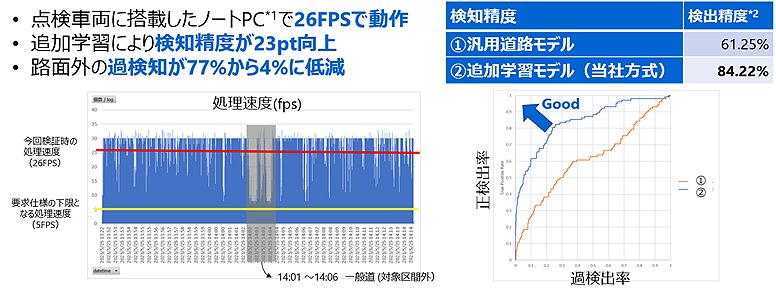
追加学習による検出精度の向上効果
こうした教師データ作成作業の効率化やポットホール検知性能の向上によって、
2024年度の実用化にメド
が立ったということです。
現在はポットホールの発見から緊急対応までの間に、夜間・休日の出社や判定会議など、大変な作業が発生することもあります。
一方、システム稼働後はAIによる自動検知、リアルタイム通報、そしてAIによる判定・補修指示と、大幅な働き方改革が実現しそうです。
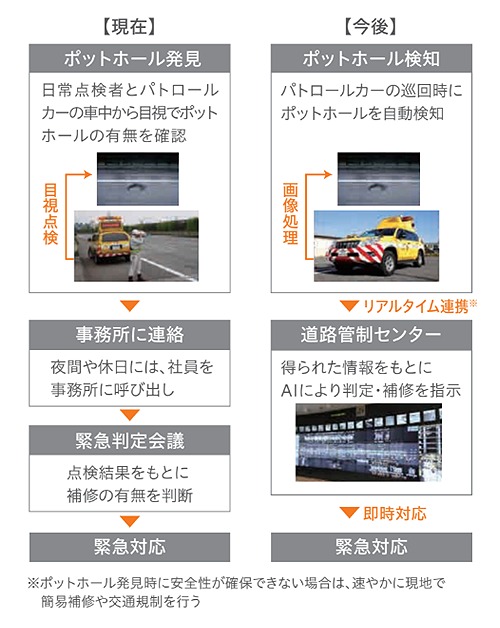
ポットホールの発見から補修対応までのワークフロー比較。AIによる検知が実用化されると、大幅にスピードアップが図られるとともに、NEXCO社員などの負担も減りそうだ
このシステムも、2024年問題の解決に大きく貢献しそうですね。