管理人のイエイリです。
コンクリート壁の維持管理などでは、ドリルによる穴開けやボルト用の充填剤注入、仕上げなどの作業が必要なことがあります。
これまでは足場を組み、作業員がそこに上って作業するのが一般的でした。



コンクリート壁へのドリルによる穴開け(上段)、充填剤の注入(中段)、仕上げ(下段)の作業例(以下の写真、資料:ミライト・ワン)
しかし、一つの穴開け作業のために、足場を組むのは工期、コストの点で二の足を踏んでしまいそうですね。
そんな壁面作業の課題を解決する画期的なマシンが、ミライト・ワンのグループ会社である西武建設と建築研究所、東京理科大学によって共同開発されています。
ナ、ナ、ナ、ナント、
ドローンでドリル作業
などを行う「壁面接触作業ドローン」なのです。(ミライト・ワンのプレスリリースはこちら)

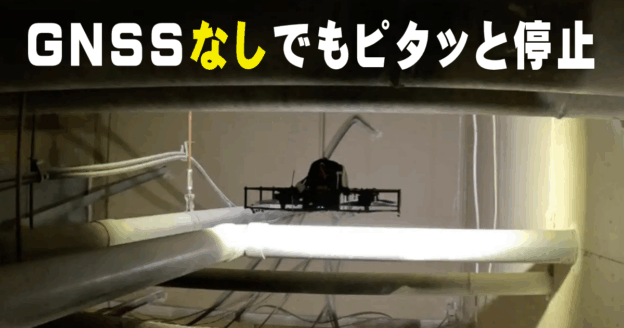
コンクリート壁に密着し、穴開け作業などを行う「壁面接触作業ドローン」
このマシンは、4つのローターによって飛行するフレーム内にドリルなどの工具を搭載し、垂直の壁に横から“着陸”して、様々な作業を行うものです。
2020年度から3者による開発が始まり、当初は外壁点検システムとしての開発が進みました。
その後、2023年度にはドリルによる壁面の中性化測定作業、2024年度には穴を充填剤で埋めて表面を仕上げる復旧作業と、年々、作業機能が進化しています。

本機による作業のイメージ

機体の細部構造。工具の反力は斜め方向に設置したローターの推進力などで確保する。工具の位置を微調整する3次元スライダーを搭載
ドローンによる作業と聞けば、気になるのが位置決めの精度です。
このマシンには、ミリ単位での位置決めができるように、左右390mm、上下280mm、前後190mmの可動域を持った位置制御機構(3次元スライダー)を搭載しています。
そこで、おおまかな位置に着陸した後、3次元スライダーで
工具の位置を微調整
することで狙った位置への穴開けなどが行えます。

壁面への着陸から3次元スライダーによる位置決めと作業、終了後の着陸までの飛行手順
気になるのは作業の品質ですが、2024年度に行った実験では、ドローンによる作業でも穴の中にシーリング材がまんべんなく充填されていることが確認できました。

シーリング材がまんべんなく充填された筒。穴の内部に仕込んでおいて作業後に取り出したもの
この「壁面接触作業ドローン」は、2025年6月4日~6日、幕張メッセで開催される「Japan Drone2025」(主催:日本UAS産業振興協議会)の西武建設ブース(ブース番号:AL-23)に出展されます。気になる方は出かけてみてはいかがでし