管理人のイエイリです。
ドローン(無人機)を飛ばすときの安全確保は、「目視」が中心となっていますが、山間部や離島への物資輸送や、災害時の情報収集・測量など長距離を飛行させる場合には、目視外での安全確保が求められます。
そこで新エネルギー・産業技術総合開発機構(NEDO)とゼンリンは、都市部での自動飛行の早期実現を目指すため、2017年6月2日に北九州市内でドローン自動飛行支援システムの実証実験を行いました。
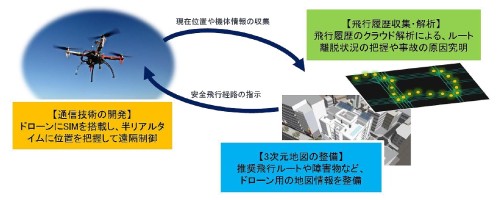
ドローン自動飛行支援システムの全体イメージ(以下の資料:NEDO、ゼンリン)
実験に使われたのは、
ナ、ナ、ナ、ナント、
廃校になった中学校
なのです。
校舎や樹木、グラウンドのフェンスなどを実際の都市に見立てて3D地図を作り、出発地から目的地までの間を安全に飛行し、着陸できるかを3つのケースについて実験しました。
離陸後、グラウンドのネットと校舎の間を通り抜けて屋上に着陸したり、途中の樹木などを避けながら最適なルートへと変更したり、バッテリー切れなどのトラブルが発生したときに最寄りの安全な場所に着陸したりといった実験を行いました。
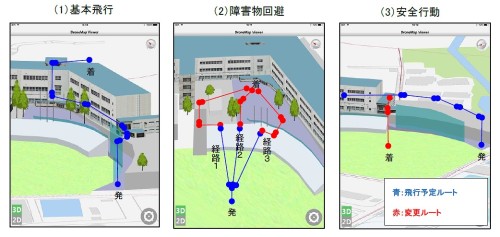
ドローン用3D地図を使った飛行実験のルートイメージ
この実験プロジェクトは、2020年代からの実現目標が設定されている「都市部などでの有人地帯での目視外飛行」を目指すものです。
ドローン界ではドローンの飛行技術をレベル1~4に分けて、着々と技術開発に取り組んでいます。
2016年4月には「小型無人機に係る環境整備に向けた官民協議会」が「小型無人機の利活用と技術開発のロードマップ」をとりまとめ、目視内の操縦飛行をレベル1、目視内の自動飛行をレベル2、無人地帯での目視外飛行をレベル3、そして
有人地帯での目視外飛行
をレベル4と定めています。
今回の実験は、経済産業省やIoT推進ラボが2016年7月に開催した第2回先進的IoTプロジェクト選考会議「IoT Lab Selection」で、準グランプリとして選定・表彰され、NEDOの事業として実施されたものです。
地形や障害物などを3D地図としてデジタルデータ化し、コンピューターで気象情報を加味しながら、飛行ルートや着陸地点を解析して自律飛行できるシステムは、まさにドローン界のIoT(モノのインターネット)と言えます。
そして、ドローン用の3D地図が整備されると、実物のヘリコプターの飛行にも大いに役立つことでしょう。
現在の計器飛行技術では、夜間や霧に覆われた山間部を飛行するのは難しいですが、3D地図で地形や樹木、送電線などの障害物が詳細にわかると、これまで以上にヘリコプターによる救助や輸送が行えるようになりそうです。