管理人のイエイリです。
橋梁を点検するドローン(無人機)などのロボットに、どんな性能が求められるかという基準は、まだ決まっていません。
そこでNEDO(新エネルギー・産業技術総合開発機構)は、日本電気(NEC)、イクシスリサーチ、エンルート、プロドローンの各社とともに、千葉県東金市内に模擬橋梁実験施設を設置し、計測システムの妥当性や風などの外乱を考慮した飛行安定性などを測るための実験を行いました。
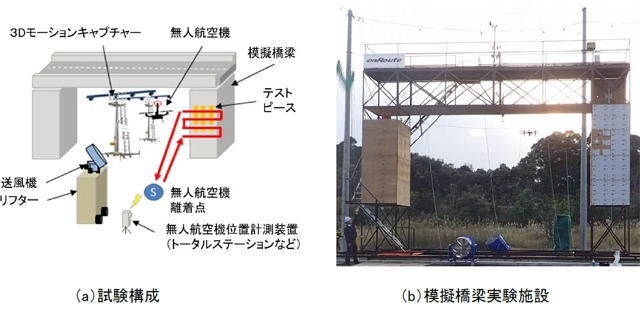
千葉県東金市内に設置された模擬橋梁実験施設(以下の写真、資料:NEDO)
橋脚の上部には橋桁を支える支承があり、
ナ、ナ、ナ、ナント、
送風機で人工風
を起こし、橋脚と橋桁の間にある狭い空間を吹き抜ける風も再現できるようになっているのです。

橋脚の左側に送風機が見える。支承のすき間から吹き込む風の外乱に対して、ドローンがどのように飛行するかを精密に計測できる
この実験は2017年10月16日からエンルートが東金市内に開設した「ドローンフィールド東金」に設置した実験施設で行っています。
ドローンによる近接画像撮影などの橋梁点検プロセスを再現したルートを設定し、実際にドローンを飛ばして飛行ルートや姿勢などのデータを、トータルステーションなどの位置計測装置と、3Dモーションキャプチャーで記録しました。
その結果、ドローンの飛行安定性を定量的に評価するために必要な試験環境の妥当性の検証も行いました。
このほか、準備から点検作業終了までの所要時間や、点検時の天候、風向・風速、照度などの環境条件のデータも取得しました。
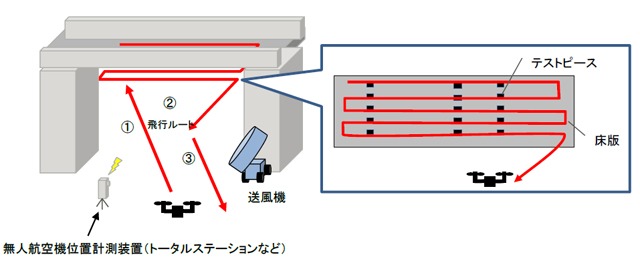
床版裏の近接画像を撮影する飛行試験のイメージ

試験環境の妥当性を検証するために行った風環境などの可視化試験
この実験で驚いたことは、近接撮影など非接触の検査だけでなく、橋脚などのコンクリートの浮きなどを
ドローンによる打音検査
で調べる際の打検器接触位置や姿勢なども調べたことです。
空中から打音検査が行える時代になったとは、画期的ですね。NECのウェブサイトに、打音点検用センサーの例が紹介されています。
なお、福島県は南相馬市・復興工業団地内の約1000m×約500mの敷地内に、ドローンや災害対応ロボットなどの試験が行える「福島ロボットテストフィールド」(PDF版パンフレットはこちら)を2018年度以降、順次、オープンしていく予定です。
その中に建設される試験用橋梁でドローンの性能評価が行えるように、今回の試験で得られた知見が福島県に提供されます。

福島ロボットテストフィールドに建設される試験用橋梁の完成予想図(資料:福島県)
土木インフラの維持管理についての技術は、ICT(情報通信技術)やロボット、AI(人工知能)の導入により、急速に進化しつつありますね。