管理人のイエイリです。
建設機械といえば、運転席にオペレーターが乗り込み、周囲の状況を見て、判断しながらアームやバケットなどを操作するマシンでした。
ところが約30年前から自動制御や遠隔操作などの技術開発が進み、最近は3次元データで掘削や土砂の敷きならしを行う「3Dマシンコントロール」や、ダンプトラックの自動運転といった高度な技術が実用化されています。
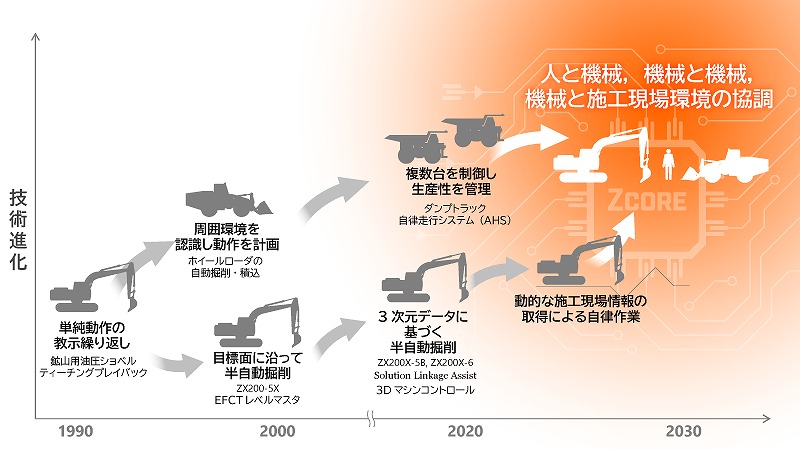
建設機械の自動化技術の変遷(以下の資料、写真:日立建機)
では、建設機械の自動化技術は今後、どんな方向に進むのでしょうか。
大手建設機械メーカーの日立建機が出した答えは、
ナ、ナ、ナ、ナント、
人と機械が協調する
現場を実現することなのです。(日立建機のプレスリリースはこちら)

人と機械が協調する現場を目指す「ZCORE」を搭載したプロトタイプ機
人と協調する建機に求められるのは、安全性と生産性です。そこで同社は自律型建機の開発や機能拡張を簡単に行えるシステムプラットフォーム「ZCORE(ズィーコア)」を開発しました。
このシステムは、オペレーターが作業時に行っている「認識・判断・実行」を機械が行えるようにして、人と機械、機械と機械、機械と施工現場環境の協調が行えるようにするものです。
車体に取り付けた様々なセンサーや通信ネットワークから情報を収集し、判断する「情報処理プラットフォーム」と、建設機械の油圧機器や動力機器を適切に動かす「車体制御プラットフォーム」からなります。
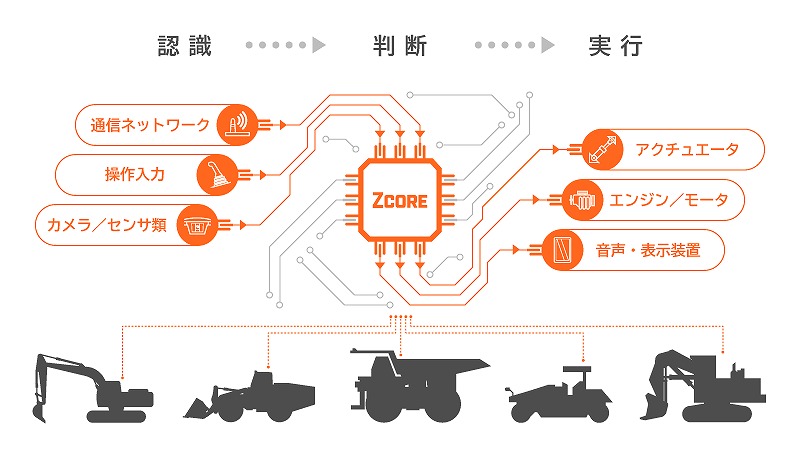
「認識・判断・実行」を建機自身で行えるようにする「ZCORE」のイメージ。建機自体を“ロボット化”して、センサーや機器を“周辺機器”のようにつないで機能拡張が行える
つまり建機自体をコンピューター付きの“ロボット化”して、センサーや油圧機器などを“周辺機器”のように自由につないで、希望の機能を作れるようにするという考え方ですね。
同社では今後、油圧ショベルやホイールローダー、ダンプトラックなどの自律型建設機械に、ZCOREを搭載していく予定です。


ZCOREを搭載した無人バックホーによる自動掘削(上)と自動放土(下)の実験
建機が自律的に動くようになると、オペレーターの働き方も変わってきます。
例えば、日立建機は2021年からオーストラリアの鉱山で超大型油圧ショベルの自動運転に向けた実証実験を行います。
この実験では、遠隔操作できる超大型油圧ショベルに、他の機械との衝突を回避する運転支援システムや、掘削・積み込みなどの作業を自動化することで、1人のオペレーターが
複数のショベルを運転
できるシステムの開発を目指すというのです。

オーストラリアの鉱山で行う実証実験に使用予定の超大型油圧ショベル「EX3600-7」(右)
将来は1人の現場監督と、テレワークのオペレーターが複数の自律化バックホーを操作して道路工事を進めていようなくシーンも見られそうですね。