管理人のイエイリです。
鹿島は2009年から、建設機械の自動運転による次世代建設生産システム「A4CSEL」(クワッドアクセル)の開発を進め、ダム工事など多数の実工事に導入してきました。
さらに2016年からは、宇宙航空研究開発機構(JAXA)や複数の大学と共同で、A4CSELをベースに建機の自動運転や遠隔操作によって月面拠点を建設するための研究開発も進めています。
その研究が、また一歩前進しました。鹿島、JAXA、芝浦工業大学は、神奈川県小田原市にある約2ヘクタールの「鹿島西湘実験フィールド」と、同・相模原市にあるJAXA相模原キャンパスを結んで、
ナ、ナ、ナ、ナント、
月面環境での遠隔施工
を想定した実証実験を行ったのです。(鹿島のプレスリリースはこちら)

月面環境での作業を想定した自律遠隔施工の実証実験(以下の写真、資料:JAXA、鹿島)
目指すのは月面でのロケット燃料工場の建設です。燃料の原料は、月のクレーター内部などの太陽光が全く届かない「永久陰」の砂に含まれている水です。この砂を掘る作業は「水掘削」と呼ばれます。
真っ暗な永久陰で砂を掘削して運搬機に積み込み、日照領域にある電解・冷却設備までピストン輸送して、燃料を製造するのです。
そこで今回の実験では、JAXA相模原キャンパスを指令拠点として、自動・遠隔操作用に改造したバックホー2台とクローラーダンプ1台を鹿島西湘実験フィールドに配置し、月面での水掘削作業を想定して、自動制御と遠隔操作によるハイブリッド施工を実証しました。
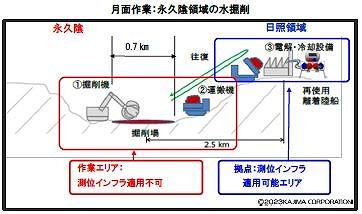
月面での水掘削を想定した作業条件
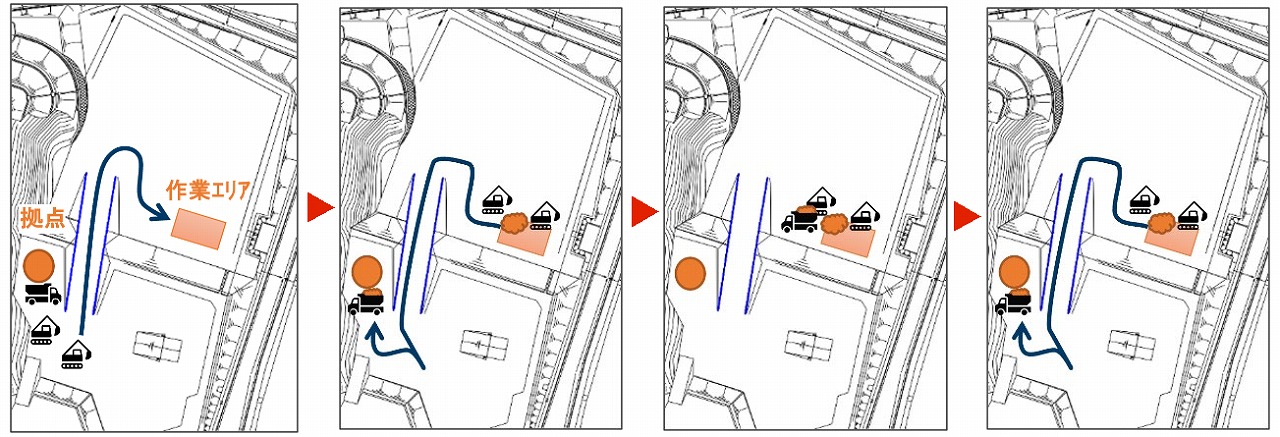
水掘削作業を想定した作業手順。永久陰(下部)で砂を積み込んだクローラーダンプが斜路を登り、日照領域(上部)まで運搬し、また永久陰に引き返す
こうした遠隔操作や自律施工はかなり実用化が進んでいますが、それはGNSS(全地球測位システム)あってのことです。一方、月面にはそのような便利なものはありません。
そこで今回の実験では、3D計測機能を持った「LiDAR」を搭載した遠隔操作のバックホーで現場周辺を計測して地図を作製し、SLAMという自己位置推定技術で建機の位置を特定するという方法を使いました。
その結果、GNSSなどのシステムがなく、通信の遅延が発生する環境でも、複数の建機が土砂の掘削・運搬作業を効率的に行えることが確認できました。
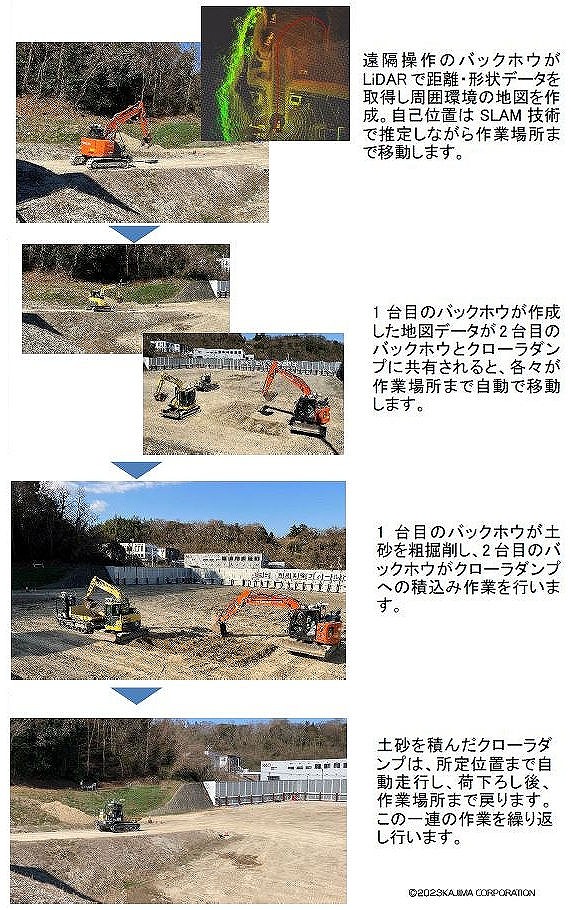
GNSSがない月面で、LiDARを使って地図を作製し、SLAMによって建機の位置を判断しながら作業を行う手順を再現した
今後、目指すのは、
月面施工デジタルツイン
の構築です。
まずは月面での建機の動きを精密に再現するシミュレーターを開発し、実証実験で得られたデータや月面環境のデータを活用して、月面で100台規模の建機を同時に稼働させる月面大規模シミュレーションを行い、最適な施工計画を検討します。
そのデータ通りに、月面の建機を遠隔操作することで、地球上で作成した施工計画通りの「デジタルツイン施工」を行うのです。
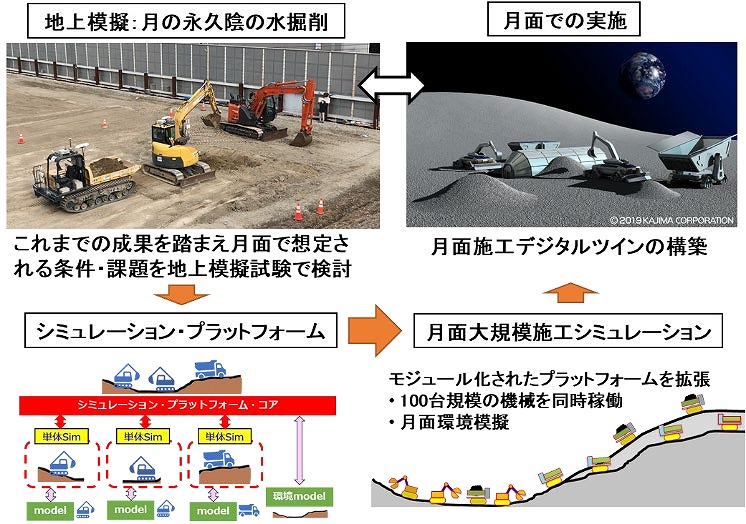
月面での「デジタルツイン施工」を目指したシミュレーション技術や自律遠隔施工技術の開発イメージ
月面での施工コストは巨額なものになり、通信にも時間がかかります。そのため、少しの手戻りやムダも許されません。デジタルでバーチャル施工を確認してから、その通りにリアル施工を行うというのは、自然な流れですね。
また、この実験で活用したSLAMによる自己位置推定は、GNSSが使えないトンネルや地下工事の自動化にも不可欠なものなので、地球上の工事にも大いに役立ちます。
“究極の田舎”である月面での工事を想定した技術開発は、建設技術の躍進にもひと役買いそうです。