管理人のイエイリです。
自宅にお掃除ロボを導入した結果、日々の生活がぐっと楽になったという経験をお持ちの方も多いでしょう。しかし、工事現場で同じようにしようと思っても、いろいろな資材や段差があり、多くの作業員も働いているので、そう簡単にはできませんね。
工事現場の清掃を自動化するという難題に2018年から取り組んできた鹿島建設とPreferred Networks(本社:東京都千代田区)は、ついに画期的な建築現場用のAI清掃ロボット、「raccoon(ラクーン)」を開発しました。

鹿島が開発した建築現場清掃用ロボット「raccoon」(以下の写真、資料:鹿島)
この清掃ロボットには、各種センサーやAI(人工知能)からなる自律移動システム「iNoh(アイノー)」が搭載されており、
ナ、ナ、ナ、ナント、
現場に置くとすぐ使える
のです。(鹿島のプレスリリースはこちら)
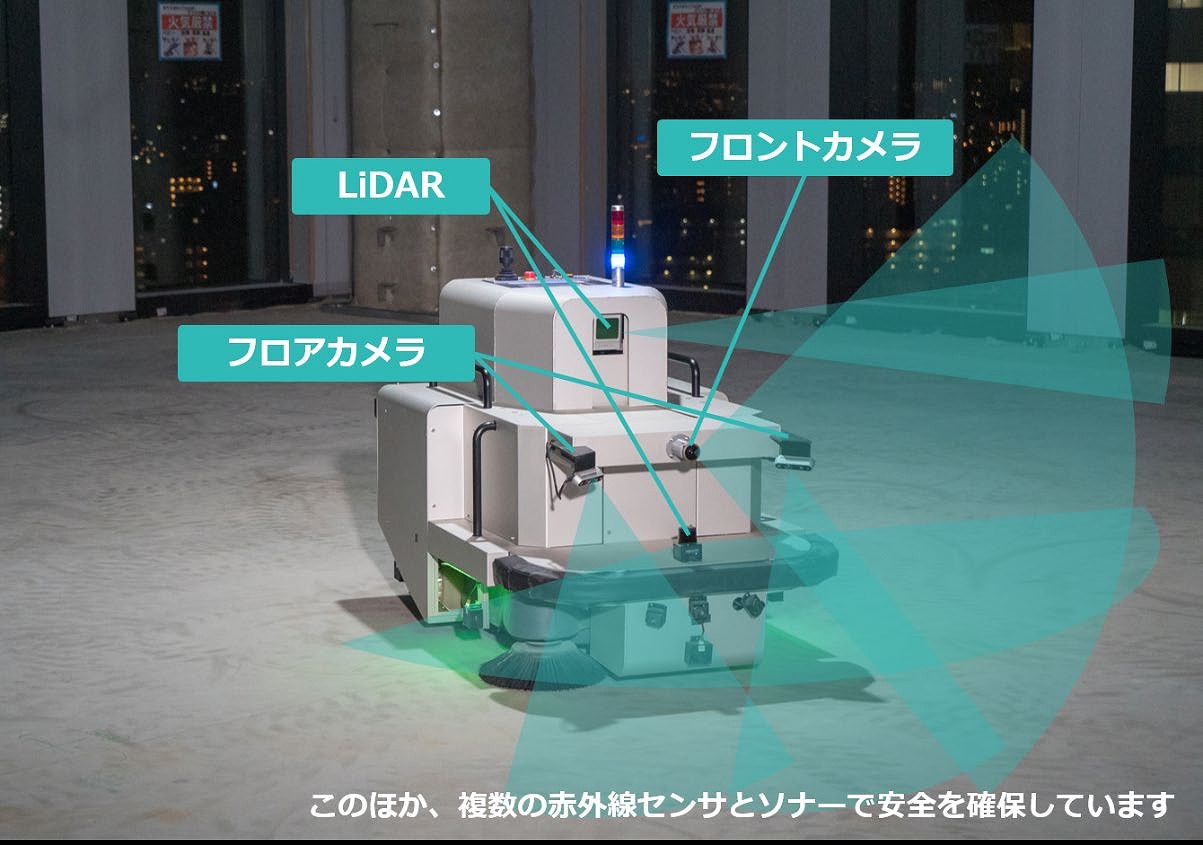
清掃ロボットに搭載された様々なセンサー
建築工事は屋内で行われることが多いので、人工衛星の電波を使って位置を計測するGNSS(全地球測位システム)がほとんど使えません。
そこで、魚眼カメラやレーザーで3D空間を計測するLiDAR(ライダー)、IMU(慣性計測装置)などの複数のセンサーからのデータを高度に統合することで、GNSSが使えない場所でもロボットの位置や周囲の状況を3D空間データとして把握できるようにしたのです。
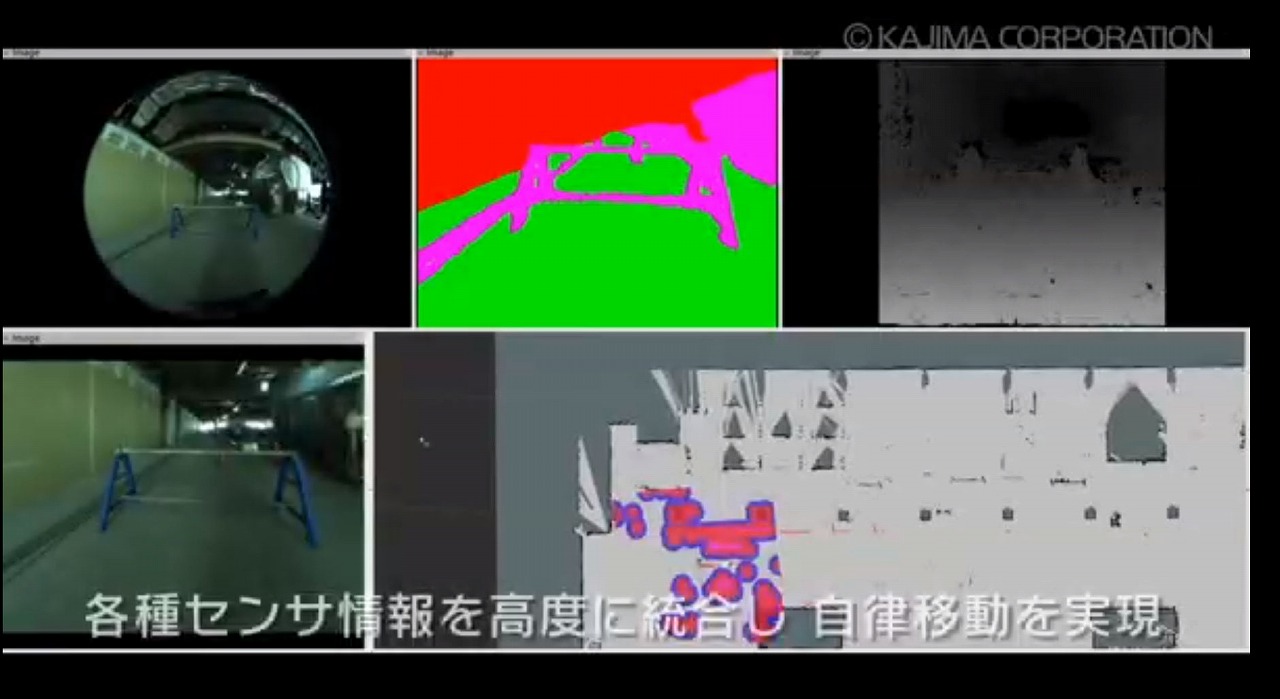
各種センサーからの情報を統合し、自分の位置や周囲の3D空間を把握できる
そしてAIの深層学習技術によって、現場の膨大な画像データを学習し、障害物や高所作業車などの移動物、立ち入り禁止エリア、作業員などを認識できるようにしました。
その結果、ロボットは障害物を避けて走行できるルートをリアルタイムに自動作成し、現場に置くと事前の設定なしで、即、利用できるのです。

障害物などを避け、清掃するエリア(緑色の部分)をリアルタイムに認識できる
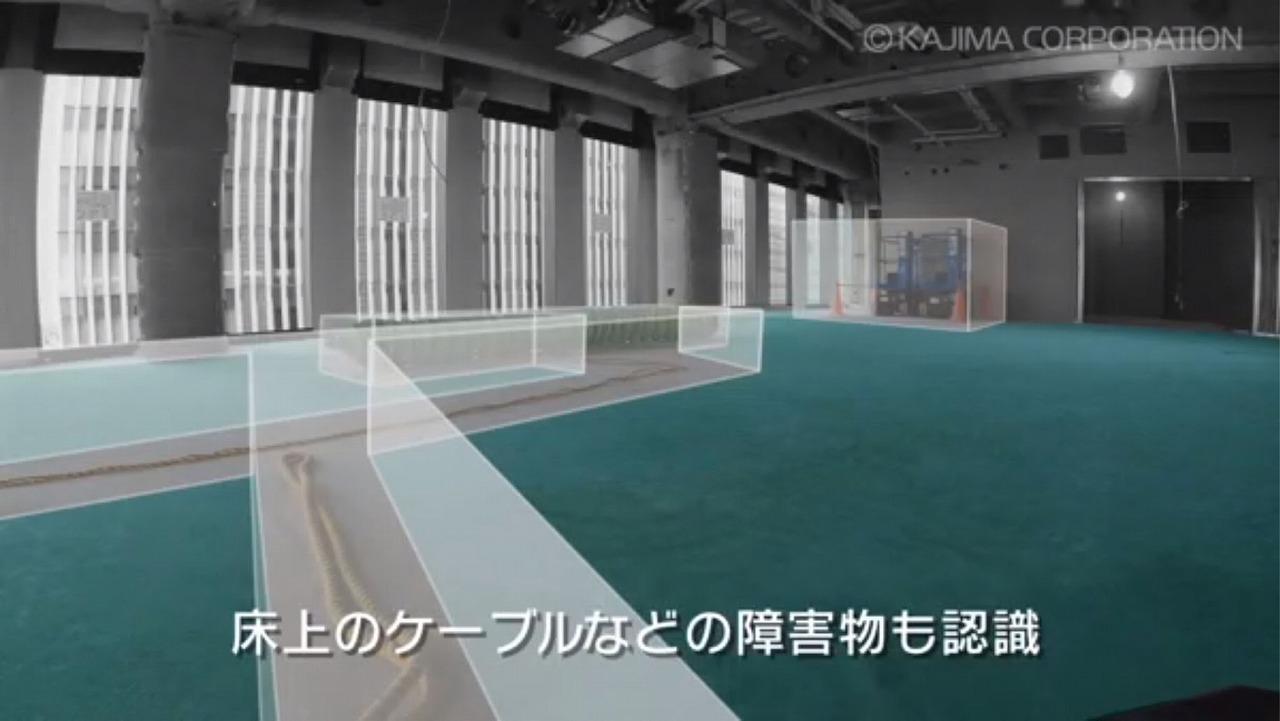
細いケーブルも自動的に回避する繊細な心も

段差や開口部も自動認識し、転落を避ける
使い方も簡単です。本体のタッチパネルで「おまかせ清掃モード」か、施工図上で清掃領域を指定する「領域清掃モード」を選び、最短3タッチで清掃を開始できます。

最短、3タッチで清掃をスタートできる簡単さ

清掃エリアをタッチパネル上で指定することも可能だ
鹿島は首都圏の複数の現場で、このロボットを試験導入した結果、
100分で約500m2
の清掃に成功し、実用性を確認しました。

100分で500平米の清掃に成功した
今回の開発で注目すべきは、複雑な現場状況の中で、ロボットが自分で危険を避けながら動くための「自律移動アルゴリズム」が実用化されたことです。
このアルゴリズムで、ドローン(無人機)による現況写真の自動撮影や、現場内の資材の自動搬送ロボなどができてくると、現場の自動化を大きく進めることができます。
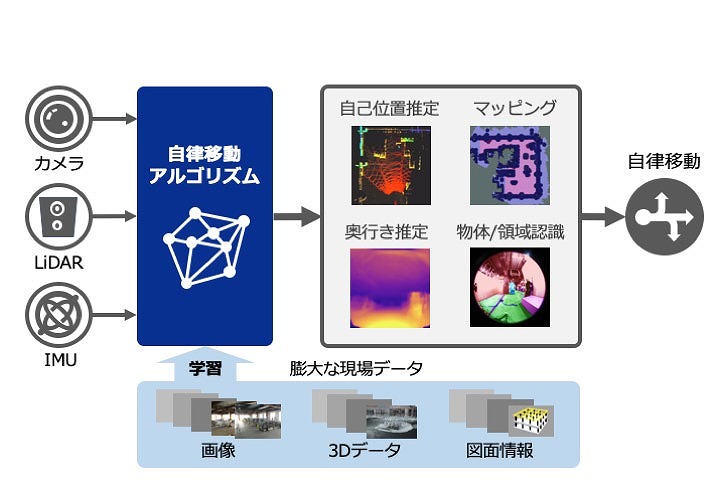
各種センサーやAIによる自律移動アルゴリズム
現場で使う資材搬送ロボットも、賢い動きができるようになりそうだ
大量生産するとコストも下がるので、建設現場の過酷な状況で鍛えられた優れたロボットを、他社や他業界に外販するビジネスも有望そうですね。