管理人のイエイリです。
人手不足に悩む建設業では今後、ロボットに任せられる仕事はロボットに、という流れになっていきそうです。
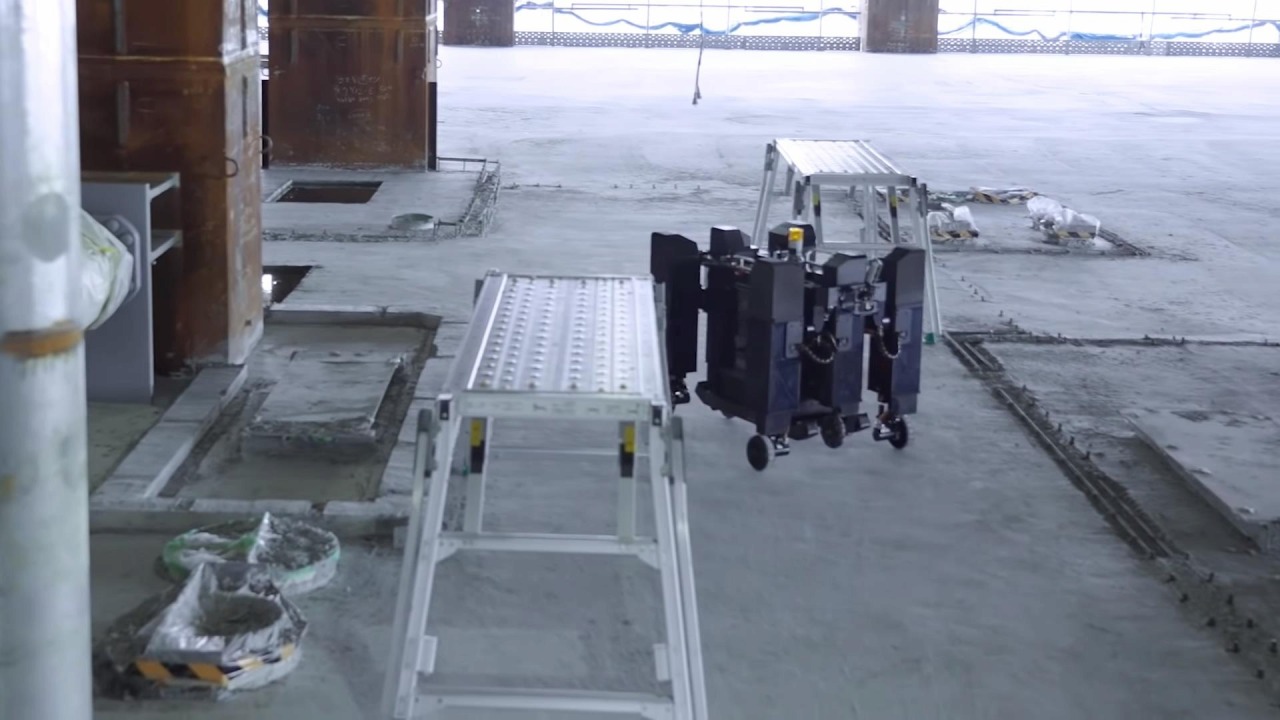
清水建設とソニーグループ(以下、ソニー)は共同で、現場の巡回・監視を行うロボットの実証実験を行うことになりました。
現場は、東京・港区で清水建設が施工中の虎ノ門・麻布台プロジェクトA街区のタワービル建設現場です。

現場を走行するロボット(以下の写真、資料:清水建設、ソニーグループ)
今回、使用するロボットは、ソニーのR&Dセンターが開発中のもので、障害物や狭い通路、開口などがある建設現場で移動できるようになっています。
障害物をクリアして走行するロボット
障害物の多い現場を巡回ロボットとしては、四足歩行式のものが一部の建設会社で使われていますが、今回、使用するロボットはタイヤ式です。
四足歩行式だと階段などを軽々と乗り越えていきますが、タイヤ式と聞くと、段差があったときに乗り越えられるのかが気になりますね。

段差の手前にさしかかったロボット
しかし、そこはちゃんと対策が考えられていました。
ナ、ナ、ナ、ナント、
6つのタイヤを上下移動
させながら、見事に段差を乗り越えられるのです。(清水建設、ソニーのプレスリリースはこちら)
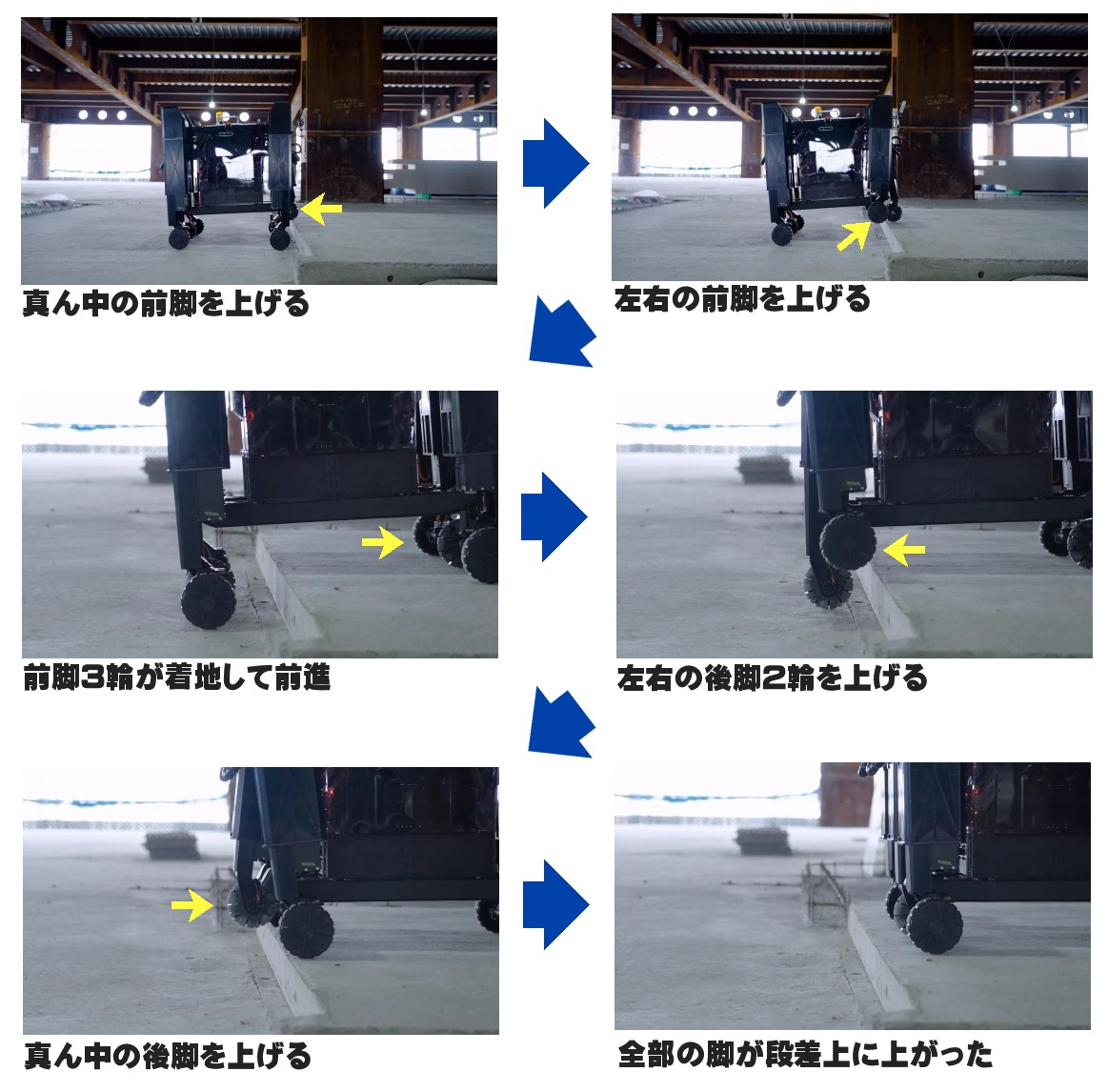
6つのタイヤを上下移動させて段差を乗り越えるメカニズム
段差から降りるときも、同様な方法で降りられます。

段差から降りるときも同じ要領で
また、このロボットにはタイヤの向きを変えるステアリング機構が付いていないようです。
普段の走行中は、3輪だけを着地させて走行し、方向を変えるときは
前輪の小さなローラー
でタイヤを横方向に滑らすようにしているのです。
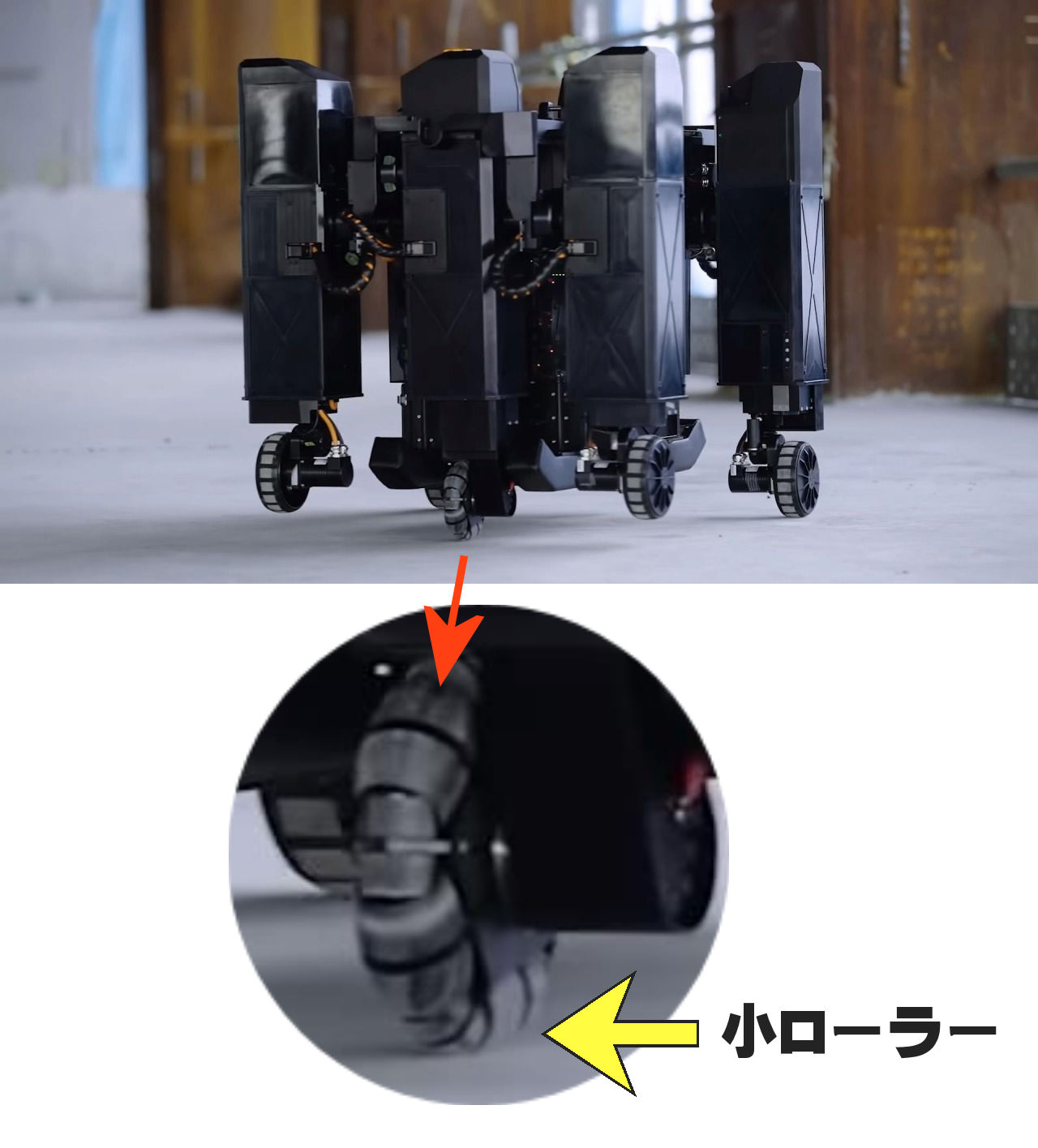
普段は3輪で走行する。前輪には小さなローラーが取り付けられており、方向を変えるときは横方向にずらす
このロボットのサイズは全高720~1220mm(500mmの可変ストローク)、全長912mm、全幅672mm、機体総重量は89kg (バッテリーを含む)とかなり大型です。移動速度は1.7m/sと速いです。
6輪でロボット脚部にかかる荷重を分散させるメカ構成により、20kgという高いペイロード(可搬重量)があります。
今回の実験では、ハード面では、段差の昇降や狭い経路の通過、水たまりや開口など歩行に適さない場所の回避、認識が難しいガラスやメッシュ壁面の認識、そしてバッテリー性能などを検証します。
また、ソフト面ではタブレットによる歩行経路の作成やロボットによる測位、静的・動的障害物の回避動作、搭載カメラによる撮影などを検証します。
タイヤ式のロボットだと、様々な工場用オートメーションパーツも使いやすそうなので、コストダウンも期待できそうですね。