農業用開水路の中でドローン(無人航空機)を自律飛行させ、水路の壁や底を3Dモデル化し、点検する技術を、トップライズ(本社:新潟市秋葉区)と米国ペンシルベニア州ピッツバーグにあるカーネギーメロン大学が共同開発した。ドローンの滞空時間や開水路の線形(路線)から、ドローンと車両のチームの最適な動作を算出するアルゴリズムも開発。スペイン・マドリッドで開催される国際会議で発表する予定だ。

開水路の中を自律飛行しながら3Dモデル化し、点検するドローン
 開水路内をドローンが低空飛行
開水路内をドローンが低空飛行
「ドローンが開水路内を自動的に低空飛行して水路内部を空撮し、リアルタイムに3Dモデルや展開図を作る。こんな最先端の点検調査技術を米国のカーネギーメロン大学と開発しました」と、新潟市秋葉区に本社を置くトップライズ代表取締役社長の大滝充司氏は語る。
ドローンにはGNSS(全地球測位システム)受信器や障害物を避けて飛行するための、超音波センサーとステレオカメラからなるガイダンスセンサーを前後左右、下の各面に備えている。これらから得られる情報を組み合わせて開水路の壁面や底面との接触を避けながら自律的に飛行する。
ステレオカメラによって撮影された映像は、ドローン搭載のコンピューターで結合・解析し、位置情報付の3次元点群データに変換、位置情報マップとして利用される。この飛行は、Visual SLAM(Simultaneous Localization and Mapping)の1つであるORB-SLAM2を利用し実現している。

開水路の中を飛行しながら移動するドローン
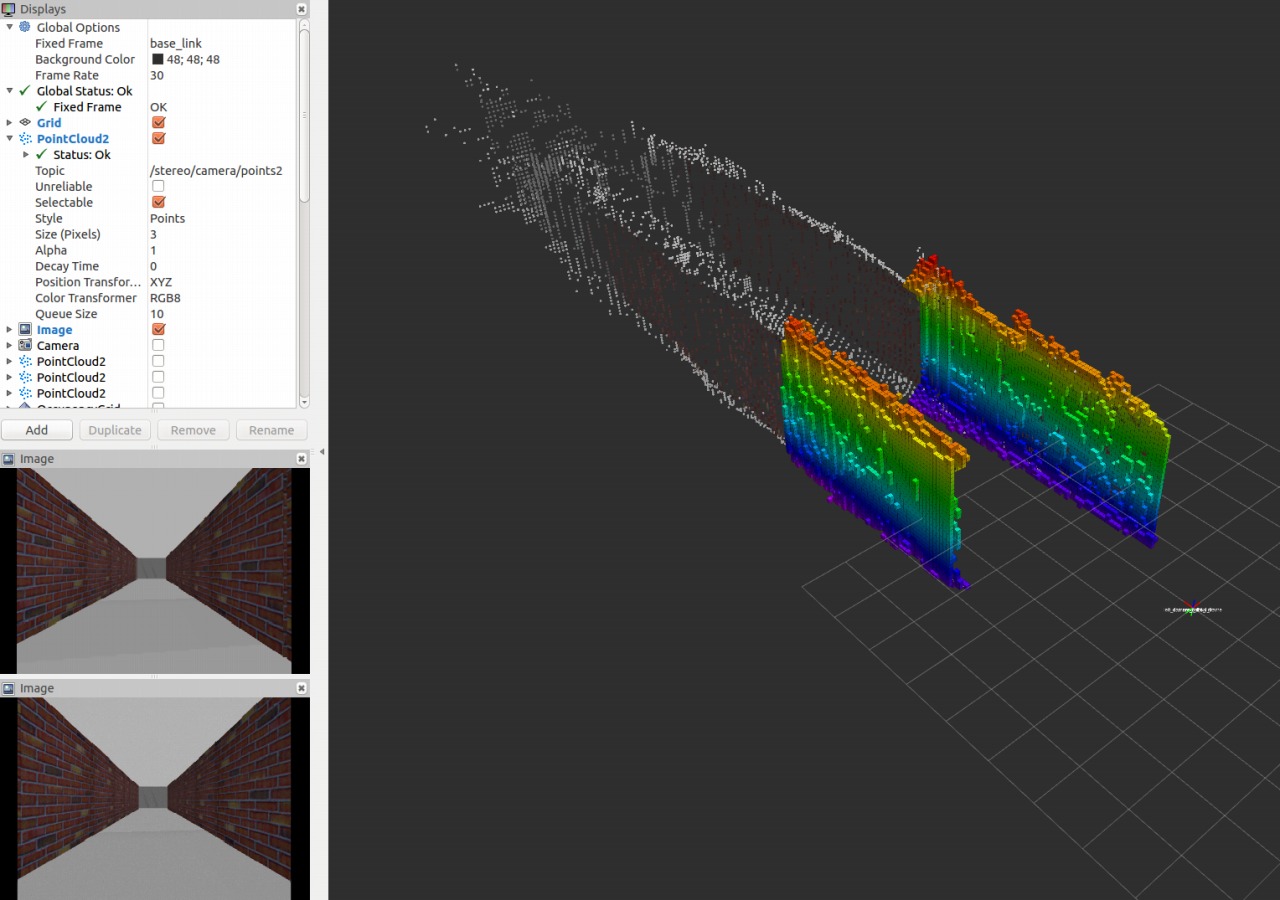
水路壁の3Dモデルをリアルタイムに作成する様子。左下の画像はステレオカメラの映像。シミュレーターによる動作確認の様子
このほか、ドローンが撮影した写真をAI(人工知能)が解析し、壁面などのひび割れを自動的に抽出する機能も開発した。

ドローンが撮影した壁面の写真(左)と、AIによって検出したひび割れ部分(右)
開水路内は、自然の風にドローンのプロペラ後流が加わり、複雑な気流になっている。ドローンのパイロットが目視で機体の安定を保つのは至難の業だ。かつ点検業務を満足する写真を撮影するとなると非常に困難な状況と言える。
オートパイロットではそのリスクを軽減することも狙いの一つだ。そこでカーネギーメロン大学との共同開発では、開水路内で安定的に自律飛行を行うための位置制御技術も開発した。
ドローンと車両の経路を自動計画するアルゴリズムも
ドローンは“母艦”となる車両とチームを組んで点検調査を行う。一度のバッテリー交換でドローンが飛行できる時間は20分、距離にして100~500m程度だ。
その間、車両はドローンと通信を行いながら移動し、あらかじめ決めておいた着陸地点でドローンが着陸するのを待つ。そしてバッテリーを交換し、次の区間を調査する。
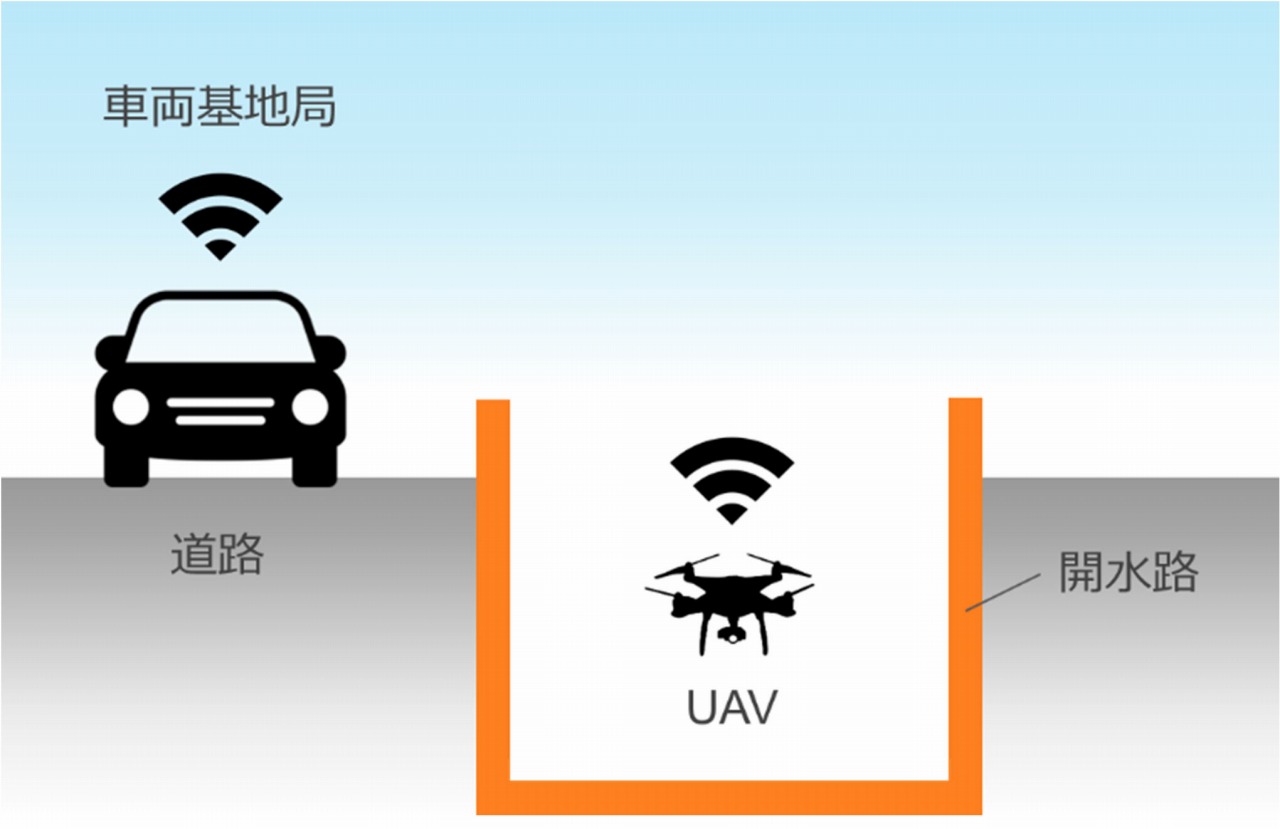
ドローンと車両がチームを組んで点検調査を行うイメージ
点検調査の効率を大きく左右するのが、飛行計画だ。開水路は網目状に張り巡らされているが、必ずしもその脇に道路があるとは限らない。
ドローンが開水路をできるだけ効率的に調査して回り、かつ車両との通信が途切れない間隔を保ちながら車両の通行経路を探し、バッテリーが切れる前に両者が同じタイミングで同じ着陸地点にたどり着けるドローンと車両の経路を計画するには、大変な手間ひまが必要となる。
そこで開発されたのが「複数のドローンと車両のチームの最適な経路を自動算出する新たなアルゴリズムを組み込んだタスクプラナー 」だ。バッテリーの持続時間やドローンの性能、交通状況を考慮しながら、ドローンと車両の経路を自動的に計画する機能を持っている。
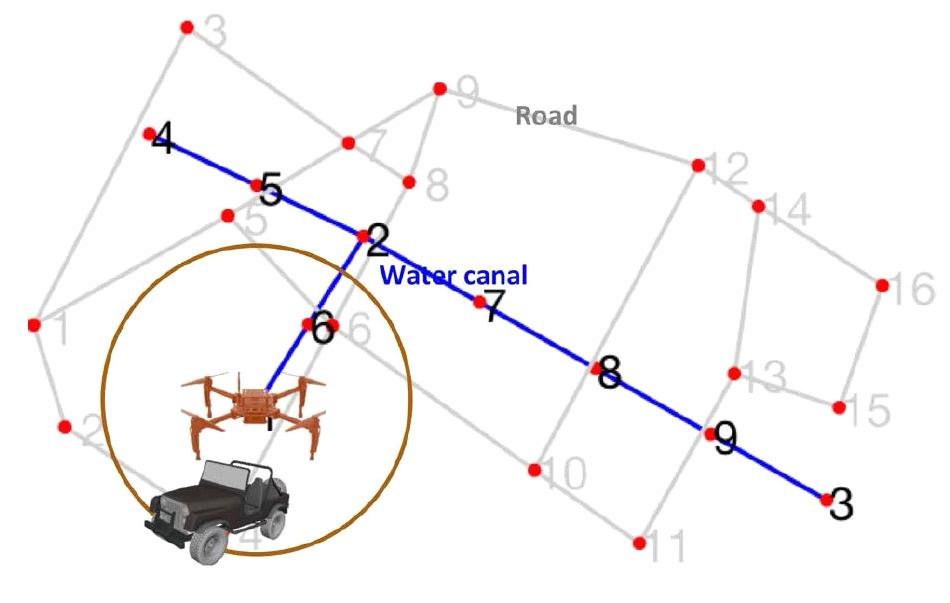
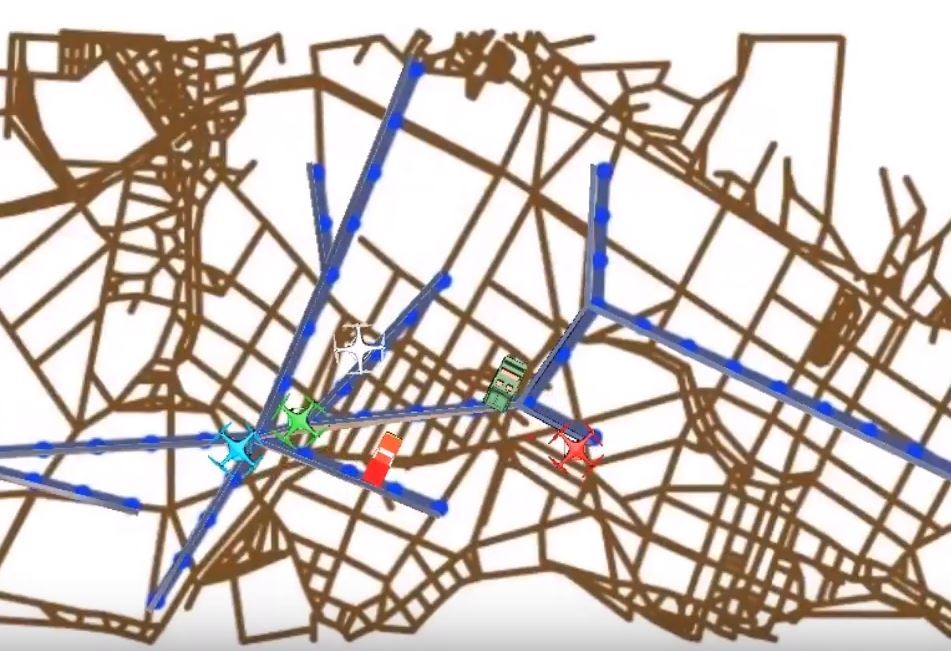
タスクプラナーでドローンと車両の経路を計画したイメージ
「共同研究が始まった当初は、タスクプラナーの開発計画はなかったが、ドローンの自律飛行や点検調査の開発が進むにつれ、飛行計画作成の重要性が高まった」と大滝氏は説明する。
日本の中小企業に初めて門戸を開いたカーネギーメロン大学
カーネギーメロン大学は“鋼鉄王”と呼ばれた伝説の企業家、アンドリュー・カーネギーが1900年に設立した。現在はコンピューター科学とロボティクスの分野で世界トップクラスの実力を誇っている。
同大学との共同研究は、機械工学科の嶋田憲司教授との出会いから始まった。
「嶋田先生は、当社のような中小企業にも真剣に向き合い、話を聞いてくれました。それをきっかけに3年にわたる共同研究がスタートしました。カーネギーメロン大学が日本で共同研究する相手は、これまで大手企業ばかりで、トップライズのような中小企業は今回が初めてだ」と大滝氏は振り返る。
嶋田教授が主宰する計算工学・ロボティクス研究室(Computational Engineering & Robotics Laboratory)には修士課程や博士課程の学生が約50人在籍し、トップライズから研究員として派遣された根本真友子氏とともに共同研究を進めている。タスクプラナーの開発は、博士課程の中国人学生のディ・デン(Di Deng)氏が中心に行った。

トップライズと共同研究を進めるカーネギーメロン大学の計算工学・ロボティクス研究室の風景

左から中国人研究者のディ・デン(Di Deng)氏・研究員の根本真友子氏・機体制御部分の開発に携わった大学院生のパラサンス・パリ(Prasanth Palli)氏
世界的なロボット学会も技術を高く評価
本研究で開発したタスクプラナーの技術は、IEEE(Institute of Electrical and Electronics Engineers/米国電気電子技術者協会)が毎年開催する世界的なロボット学会「IROS」も高く評価した。本タスクプラナーについての論文が、2018年10月にスペイン・マドリッドで開催される「IROS 2018」に採択されたのだ。
2017年 の学会では、応募論文2164本のうち採択率は45%という狭き門だった。

2018年10月1日~5日、スペインのマドリッドで開催されるIROS 2018のウェブサイト
トップライズは今回、開発した技術を日本の農業用水路の点検調査に活用できるようにするため、実用的なシステムを開発していく予定だ。
日本国内の基幹的な農業用用排水路は約4万7000kmにのぼり、うち開水路は約3万kmと6割以上を占めている。これらの開水路は、1960年代を中心に大規模に整備され、既に標準的な耐用年数である40年を経過したものも多いが、現在も点検や補修を行いながら使用されている。
これまでの点検方法は、技術者が開水路に沿って歩きながら目視点検を行い、野帳などに手書きで記録していく方法が主流だった。そのため、1日に行える近接目視による調査は500m2程度だった。
それが、タスクプランナーとドローンを使うと、1日当たり約1400m2の点検調査が行える。従来の3倍近い効率アップとなる。
少子高齢化の影響で、農業土木施設の維持管理も、生産性向上や省人化が求められている。トップライズの地道な技術開発により、現場の作業も大きく変わっていきそうだ。
ドローンによる開水路の点検調査システム開発に関わった日本側のスタッフ。左からトップライズi-Con推進室室長の近藤真史氏、代表取締役社長の大滝充司氏、常務取締役 営業本部長の藤田光昭氏、本店 統括課長の渡邉卓己氏
| 【問い合わせ】 株式会社 トップライズ 〒956-0864 新潟市秋葉区新津本町2-8-14 TEL 0250-24-8214 ウェブサイト:http://www.toprise.jp/ |