



管理人のイエイリです。
大地震などで建物が倒壊した場合、内部の生存者を捜索し、救出するためにはガレキ内の状況を把握する必要があります。
しかし、ガレキの上に人が乗って作業すると、その荷重でガレキが崩壊が崩壊する二次災害が発生する心配があります。
そこで清水建設、東北大学、国際レスキューシステム研究機構は、被災建物内探査システム「ロボ・スコープ」を共同開発し、実用化のメドをつけました。
その特徴は、ガレキに荷重をかけないように、
ナ、ナ、ナ、ナント、
空中からガレキに進入
し、内部の状況を遠隔操作で調査できることなのです。
 |
|
|
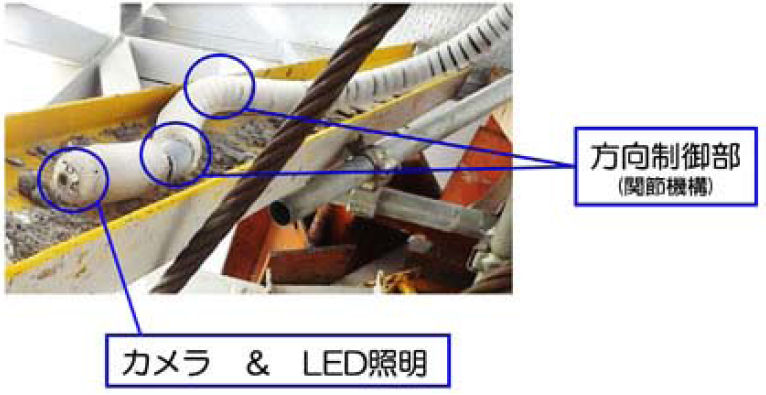
「ロボ・スコープ」の先端部に取り付けられたカメラやLED照明(写真・資料:清水建設。以下同じ) |
装置は全長10mのホース状で、先端部にはカメラやLED照明を備えています。ガレキのすき間をかいくぐって進むために必要な方向制御は、内視鏡のように先端に設けた2つの関節を折り曲げることにより行います。
こうしたガレキ内調査ロボットの場合、前進するための推進機構が問題になりますが、このロボットはホース外部が繊毛で覆われており、振動を与えることで前進方向の推進力を得る仕組みになっています。
カメラの推進や関節の首振り、照明のオン/オフなどは、ゲーム機と同じようなコントローラで遠隔操作できます。
また、ホースの根元には発電機や通信・制御ユニット、旋回ファンのほかホースを巻き取るドラムなどが付いています。その装置重量は約3tを見込んでいるとのこと。
 |
|
|
被災建物内探査システム「ロボ・スコープ」の全体図 |
え、3tもあるのに、どうやってガレキに荷重をかけないようにできるの?と、お思いの方もいらっしゃるでしょう。
そこは、さすがに建設会社が開発しただけのことはあります。
その答えは、
ナ、ナ、ナ、ナント、
装置全体をクレーンで
吊り下げたまま、ガレキ上空から作業する、というものです。
なるほど、この方法だと、ガレキに荷重をかけずに作業できるほか、崩壊の恐れがある場所で調査員が二次災害に巻き込まれる心配もありませんね。
ホースの先端に線量計やガレキの削孔・切断機能を追加すると、福島第一原子力発電所の原子炉建屋内部の探査も可能になるそうです。
私的にはタイヤとかクローラーとかではなく、繊毛と振動によって推進力を得る機構に、一番感心した次第です。グッドアイデアですね。












