管理人のイエイリです。
既存建物をリフォームするとき、室内を3D計測したデータがあればとても便利です。
しかし、これまでの計測手法だと、3Dレーザースキャナーで場所を変えながら何度も計測した点群を合体させたり、写真計測の結果を3次元CAD上でトレースしたりと手間ひまがかかっていました。
この作業を圧倒的に楽にしてくれそうなのが、米国・フィラデルフィアのベンチャー企業、エクシン・テクノロジーズ社(exyn technologies)が開発したドローンです。
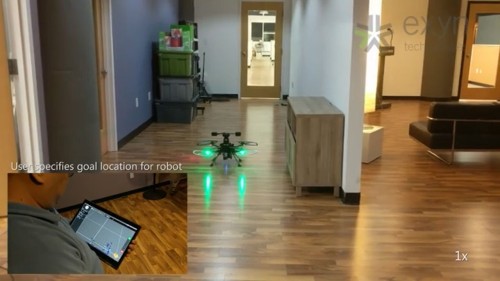
離陸を待つドローンとパイロット用のタブレット画面(左下)(以下の資料:exyn technologies)
いろいろな家具や障害物が置かれた室内を、
ナ、ナ、ナ、ナント、
飛びながら3Dスキャン
し、自動的に点群データを作ってくれるのです。

飛行しながら室内を3D計測するドローン
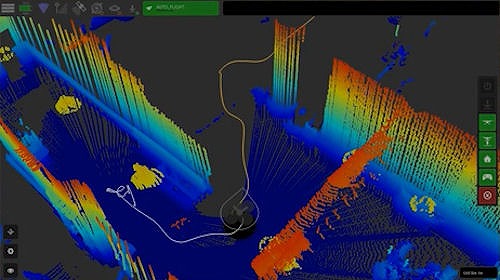
リアルタイムに作成される室内の点群データ。高さ3.25m未満の部分だけを表示している
このドローンはGPS(全地球測位システム)のルートや室内の図面など、飛行前には一切、情報は不要です。
ドローンにはコンピューターや様々なセンサーが搭載されており、これらの情報を融合させて自律的に飛行します。
パイロットの作業は飛行前に目的地の位置をタブレット上でインプットするだけです。すると、ドローンはスキャンしたデータを元に目的地までのルートを自分自身で考え出し、スキャンしたデータからさらにルートを絞り込みながら目的地にたどり着きます。
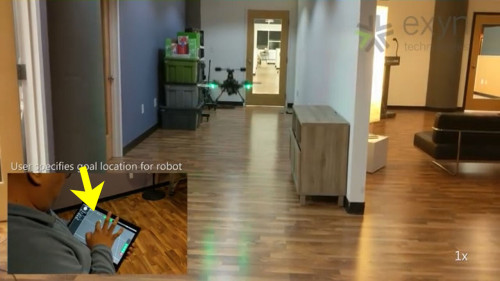
タブレット画面をタップし、目的地をインプットしたところ
室内を飛ぶだけに、障害物に当たって墜落する可能性もありそうですが、大丈夫なのでしょうか。
その点も心配はいりません。飛行ルート上に障害物を見つけると、
その上を飛び越して
自動的にクリアするのです。

飛行ルート上に人影を発見

自動的に上昇し、人を飛び越してクリア

最初に設定した目的地を自動的に探し出し、着陸したドローン
このドローンを開発したエクシン・テクノロジーズ社は、ペンシルベニア大学の応用科学工学科のビジャイ・クマー(Vijay Kumar)学科長が率いるクマー研究室(Kumar Lab)からスピンオフして設立されました。