



管理人のイエイリです。
山岳トンネル工事と言えば、ドリルを使って岩盤に穴を開け、爆薬で発破するといった、ホコリにまみれた現場を想像してしまいます。
ところが最近の山岳トンネル工事にも、ロボットやAI(人工知能)をはじめとするICT(情報通信技術)の導入が急ピッチで進んでいます。
安藤ハザマは2019年11月19日、古河ロックドリル(本社:東京都中央区)と共同で、画期的な穴開け作業システムを開発したことを発表しました。
ナ、ナ、ナ、ナント、
無人のドリルジャンボ
を、離れた場所にある中央制御室から遠隔操作できるのです。(安藤ハザマのプレスリリースはこちら)

中央制御室の内部(左)と遠隔操作できる無人ドリルジャンボ(右)(以下の写真、資料:安藤ハザマ)
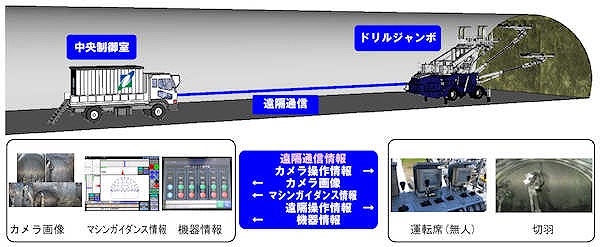
遠隔ドリルジャンボの運用概要図
このシステムはトンネル坑内に中央制御室を設置し、掘削最前線(切羽)で作業するドリルジャンボを通信設備でつないで遠隔で操作するものです。
オペレーターは、中央制御室に集約された様々な施工データをもとに、ドリルジャンボに取り付けたカメラ画像とドリルジャンボのマシンガイダンス情報に従って操作します。
他の技術者と協議しながらの操作も可能となり、より効率的で精度の高い穴開け作業ができます。
ここで問題となるのは、いかに穴の掘削作業や爆薬を減らして、目的のトンネル断面を発破するかです。
安藤ハザマはドリルジャンボの遠隔操作に先立つ10月4日、発破作業を最適化する発破パターン作成プログラムを開発したことを発表しました。(安藤ハザマのプレスリリースはこちら)
発破はまず、切羽の中心付近を「心抜き発破」した後、外側に向かって順次、爆破していくことで破砕範囲を広げていきます。
このプログラムは、地山状況に応じて最適な発破パターンを算出して、個々の穴配置を座標化。その座標データをドリルジャンボに読み込ませることで、スピーディーかつ穴開け作業の時間や装薬量を2~3割減らすことに成功しました。
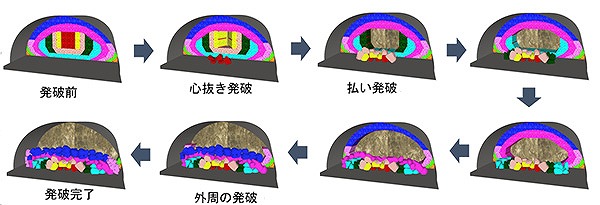
発破の順序
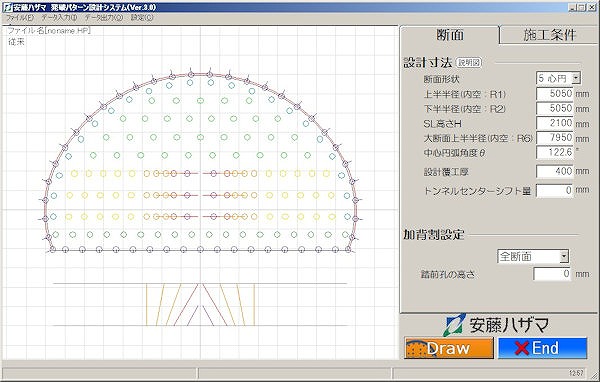
発破パターン作成プログラムの画面
さらに同社は、12月11日に発破後の切羽の地質を自動的にセンシングし、岩盤の圧縮強度や風化程度、割れ目間隔を定量的に評価する「切羽地質情報取得システム」を開発しました。(安藤ハザマのプレスリリースはこちら)

切羽データ取得用の計測車両(左)と搭載された機器類の配置(右)

切羽データを取得中の計測車両
岩盤の圧縮強度については、ドリルジャンボの作業データから
AIで算出
するアルゴリズムを、北海道大学の長谷山美紀教授の指導により開発しました。
また、岩盤の風化程度は切羽の画像から算出するアルゴリズムを、筑波大学の澁谷長史助教の指導により開発しました。「マルチスペクトル画像」と呼ばれるものを分析し、AI(人工知能)によって風化度を算出します。
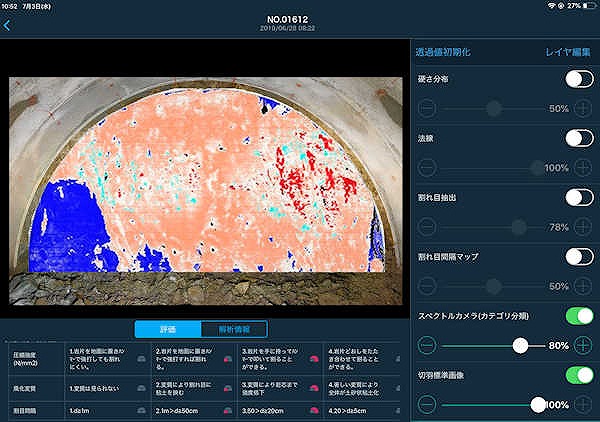
AIによって算出された風化度の図をタブレット端末に表示したところ
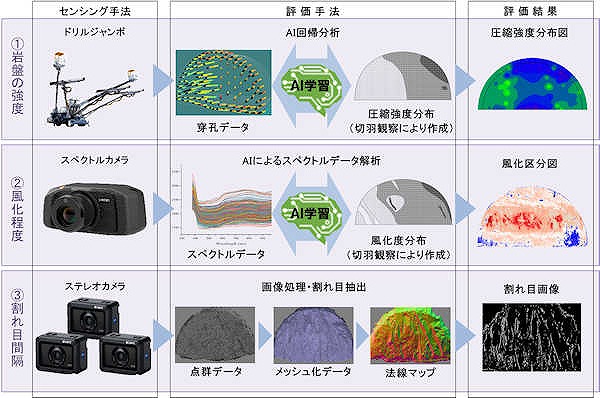
岩盤強度、風化度、割れ目間隔のデータ処理の流れ
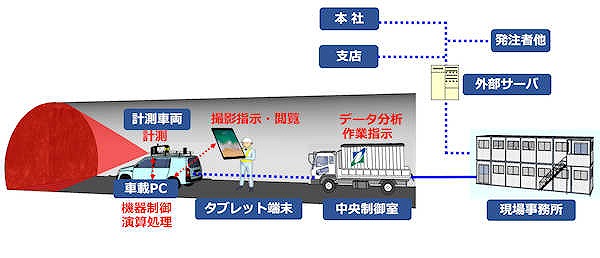
取得した岩盤データの活用ネットワーク
これらの3つのプレスリリースは、安藤ハザマがICTによって山岳トンネル工事の生産性を大幅に高める「山岳トンネル統合形掘削管理システム」の取り組みとして、2019年10月、11月、12月と連続して発表したものです。
山岳トンネル工事の生産性は、約60年前の東海道新幹線時代に比べてすでに10倍以上に上がっていますが、さらに向上していきそうですね。土木工事の“優等生”といっても過言ではありません。












