管理人のイエイリです。
ライカジオシステムズと竹中土木は、盛り土工事の品質管理を高精度化しようと、画期的な転圧管理システム「Dual Mast Roller」を開発しました。
振動ローラーの鉄輪の両側に2本のGNSSアンテナを立て、ライカのGNSS受信機「Leica iCON gps 80」によって鉄輪の位置と方位角を直接、測定するとともに、鉄輪の傾きまでも傾斜計で測定できるようにしたものです。

それだけではありません。地表面を踏んだ鉄輪の幅や位置、方向角、傾斜角の情報を使って、
ナ、ナ、ナ、ナント、
地表面を点群計測
できるようにしたのです。(ライカジオシステムズのプレスリリースはこちら)
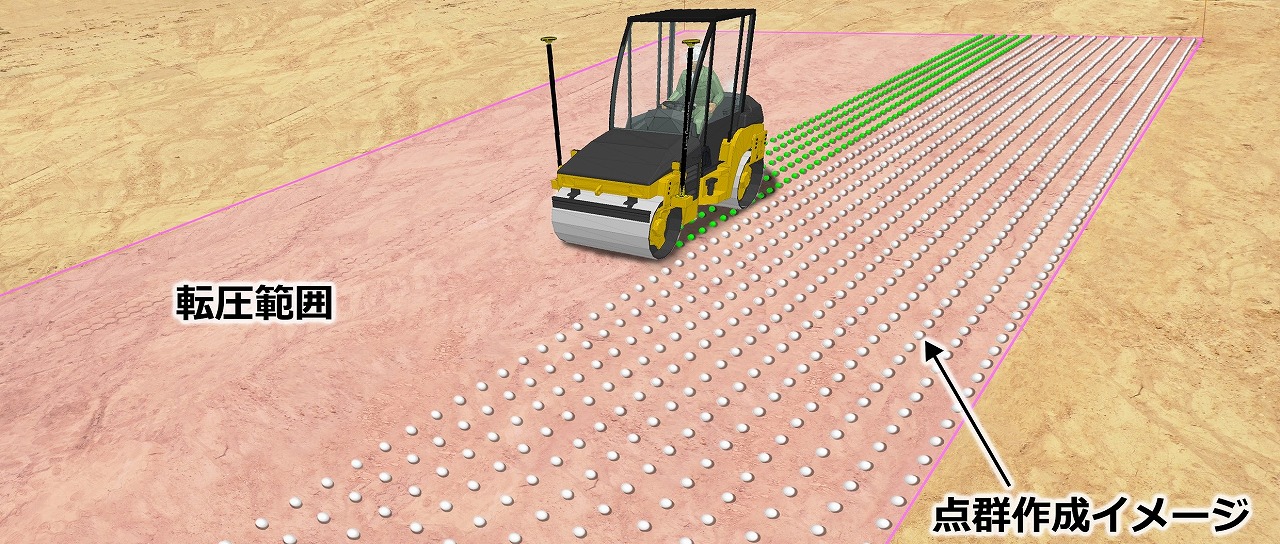
鉄輪が踏んだ地表面の部分に点群データができていくイメージ。点群の密度は任意で設定できる
オペレーターは運転席のパソコンで点群データを見ながら、点群データに凸凹ができている部分をその場で踏み直すことができます。
このシステムが開発されたのは、従来のGNSS(全地球測位システム)を使った締め固め管理で「転圧もれ」という問題があったからです。
これまでは土を締め固める振動ローラーの位置をGNSS(全地球測位システム)でリアルタイムに追跡し、盛り土上面の通過回数をカウントする方法がよく使われてきました。
しかし、この方法をもう少し精密に見ていくと、問題も出てきます。それは振動ローラーの鉄輪が締め固めを行う位置と、GNSSアンテナの位置がずれていることです。
もちろん、前後、左右、上下の「オフセット量」は考慮していますが、オペレーターがハンドルを切ったとき、鉄輪が左右に振れるのでGNSSの位置計測と誤差が生じ、「踏み残し」が起こってしまうのです。
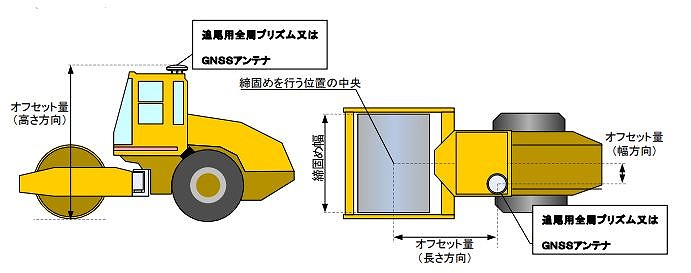
鉄輪の位置とGNSSアンテナの位置の違いは、オフセット量で管理されている
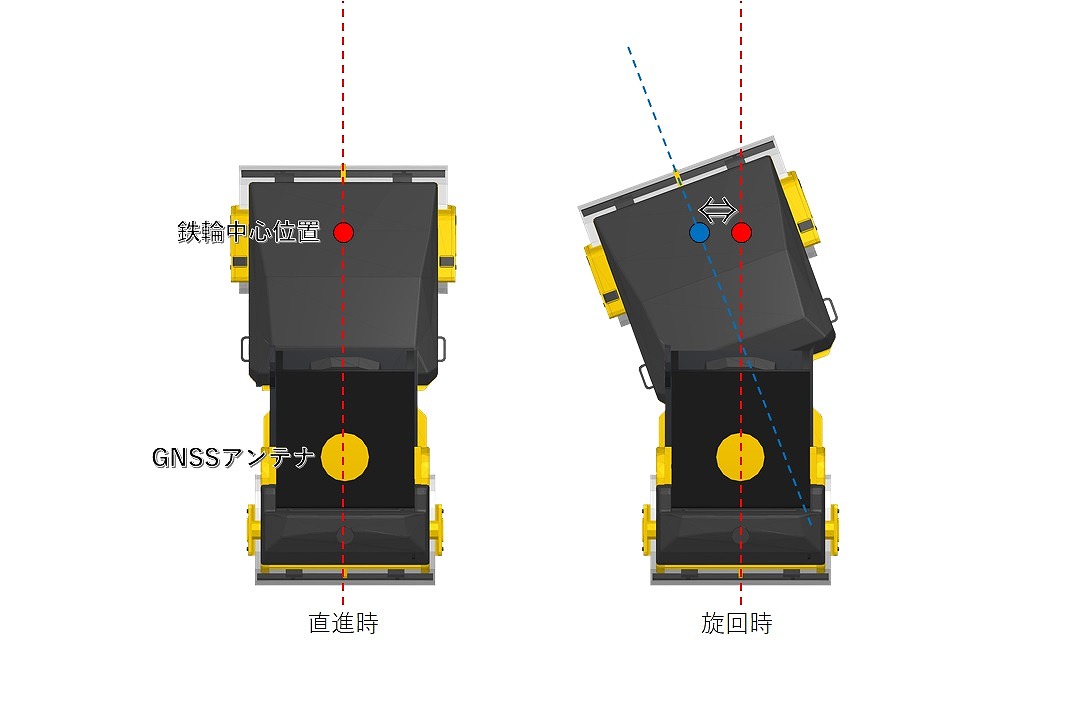
オペレーターがハンドルを切ると、鉄輪の位置とGNSSによる計測位置に誤差が生じ、「転圧もれ」につながる
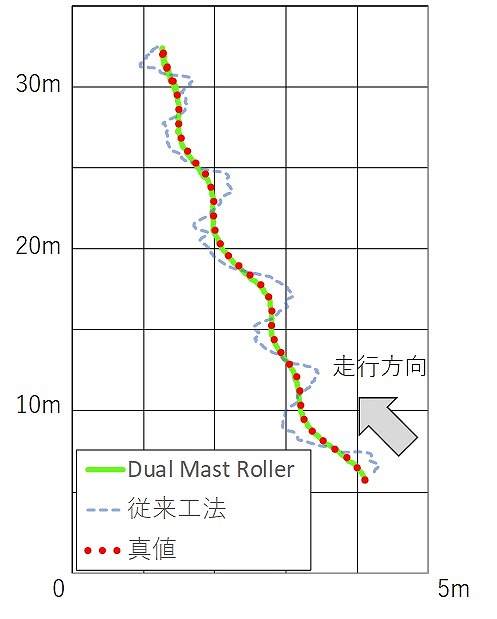
振動ローラーをスラローム走行させて、ローラーの計測位置を較したところ。Dual Mast Rollerは真値にピッタリ合っていることがわかる
今回、「Dual Mast Roller」が開発されたことで、ハンドルを切ったときでも、誤差範囲は水平方向で20mm以内、鉛直方向で30mm以内となりました。
そして、今後は、さらなる点群データの活用も行う予定です。
ひととおり転圧が終わると、次の層の土砂をまき出す作業に移りますが、このとき、転圧完了後の点群データを、ICTブルドーザーに渡すことで、地表面に山や谷があっても
一定の層厚
でまき出しを行うことができるようにする層厚管理システムも開発する予定です。
さらに点群データを利用して、リアルタイムに土量管理や締め固め前後の土量変化率の管理が行えるようにします。
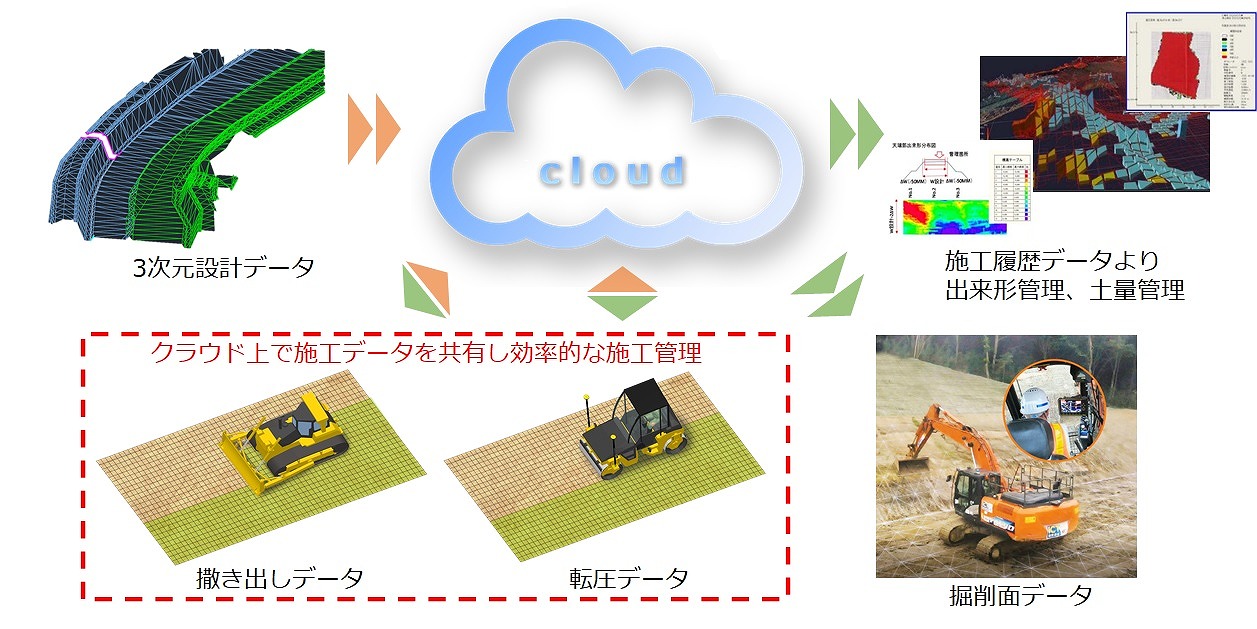
振動ローラーの鉄輪で計測した点群データは、今後、出来形管理や土量管理などにも幅広く活用する計画だ
ドローンや3Dレーザースキャナーを使わず、鉄輪で点群計測するという発想が面白いですね。