管理人のイエイリです。
コベルコ建機は2018年から「誰でも働ける現場」をテーマに掲げ、中長期的な研究開発を進めています。
重機の遠隔操作システム「K-DIVE」もその中核を担うシステムです。
開発のロードマップを3つのステップに分け、これまで「近距離での遠隔操作」(ステップ1)、「遠距離での遠隔操作」(ステップ2)の開発を行ってきました。
2020年には、約300km離れた北海道の札幌市と帯広市の間で、光ファイバーケーブルを経由して建機を遠隔操作する実証実験なども成功させています。
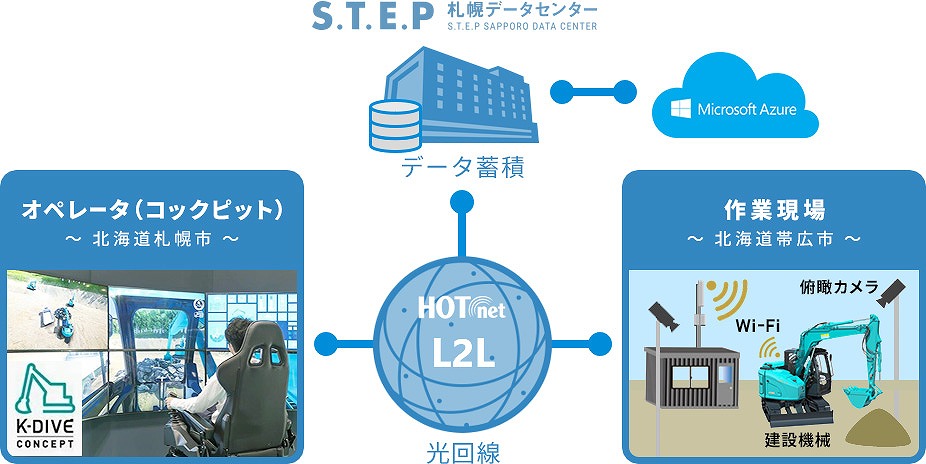
2020年に北海道札幌市と帯広市の間で行われた建機の遠隔操作実証実験イメージ(以下の資料、写真:特記以外はコベルコ建機)

札幌市にいるオペレーター(左)が、約300km離れた帯広市のバックホー(右)を遠隔操作することに成功した
そして、最終段階のステップ3では、テレワークの重機オペレーターと現場を、
ナ、ナ、ナ、ナント、
クラウドマッチング
で仲介することにより、特定の人・場所・時間などの制約を受けずに、施工できるようにするというのです。(コベルコ建機のプレスリースはこちら)
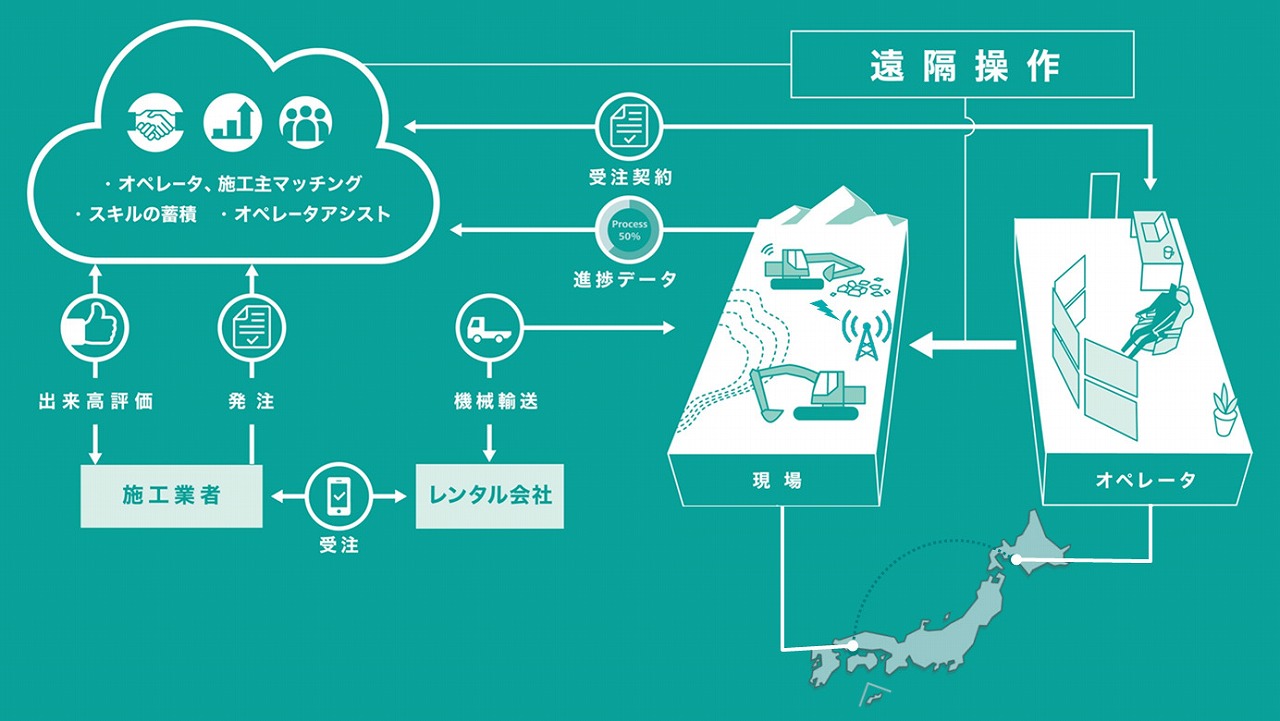
K-DIVEが最終的に目指すイメージ。テレワーカーの重機オペレーターと現場をクラウドでマッチングし、特定の人や場所、時間の制約なしに現場で働けるようにする
これが実現すると、例えばある造成現場で稼働するバックホーに、今日は札幌のオペレーター、明日は広島のオペレーターというように、手の空いているオペレーターが日替わりで乗って働くことも可能になるのです。
しかし、現場作業をテレワーク化するためには、その現場の状況をよく把握しておく必要があります。例えば、重機周辺の現場状況や埋設物の有無、土の形や体積などです。急斜面や水たまりなどに気を付ける必要があります。
そこでコベルコ建機は、ドローンによる3D点群計測などを展開するセンシンロボティクス(本社:東京都渋谷区)と協業し、
現場の見える化
システムの開発で協業することになりました。
具体的には、センシンロボティクスが得意とするドローンやLiDAR(3Dレーザースキャナー)を使って各種データを収集し、3D点群による測量結果や、水流シミュレーション結果の3D図面への反映による情報の可視化を行います。
これらの情報は、テレワークする重機オペレーターのコックピットにリアルタイム伝送します。

現場情報の可視化イメージ。3Dでこれだけのことがわかれば、実際の現場に行ったのと同じような理解がえられそうだ
また、センシンロボティクスは、スキャン・エックス(本社:東京都港区)と共同で、3D点群データから地物や樹木などを自動的に認識するフィルタリングや高度な解析技術、データ共有システムなどの開発を進めています。

スキャン・エックスのクラウドを利用した現場全体の3D点群マップ化イメージ
センシンロボティクスと言えば、自動離着陸、自動充電、撮影データの自動転送の機能を備え、完全自動運用型ドローンシステム「SENSYN Drone Hub」を製品化しています。

完全自動運用型ドローンシステム「SENSYN Drone Hub」(写真:センシンロボティクス)
日々刻々と変わる現場の状況を、ドローンで「現場のリアルタイム・デジタルツイン化」を行い、そのデータを工事関係者がクラウドで共有しながらテレワークする近未来の建設業が、なんとなく想像できそうですね。
さらに下の動画を見ると、テレワークの先には、建機の自動運転が待っていることがわかります。これからの働き方改革をイメージするのに参考になりますよ。