管理人のイエイリです。
ずらりと並んだモニターの画面には現場の映像や、CGアニメーションのようなものが映っています。そこには、大林組のシンボルであるカーキ色の作業服に身を包み、あちこちの画面に目をやりながら黙々と仕事をするオペレーターがいます。

モニターの映像を見ながら、黙々と仕事をするオペレーター(以下の写真、資料:大林組)
彼はいったい、何をしているのかというと、
ナ、ナ、ナ、ナント、
現場のクレーンを遠隔操作
しているのです。
大林組はこのほど、「クレーン自律運転システム」を開発しました。そのモニター画面には現場の全景やクレーン、吊り荷などの状況を再現した3Dモデルやカメラ映像がリアルタイムに表示され、現在の状況がいろいろな角度から確認できます。
オペレーターは、この制御室から複数の現場のクレーンを遠隔操作することができるのです。
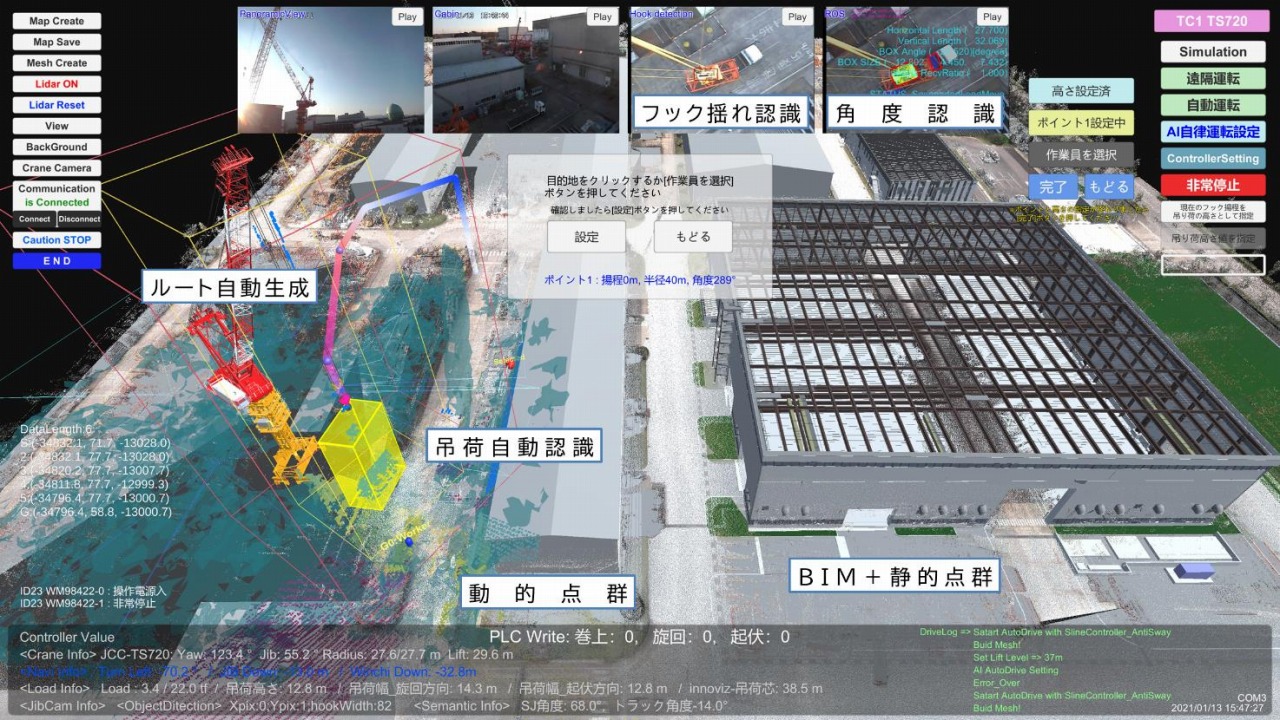
オペレーターが見ていたモニター画面。現場の状況が3Dモデルやカメラ映像でリアルタイムに表示される

クレーン自律運転システムの全体イメージ
これまでのクレーン運転は、クレーンのフックに吊り荷を取り付ける「玉掛け」作業から、途中の運搬、そして吊り下ろして「玉外し」を行うまでの全過程の操作をオペレーターが行っていました。
このシステムの特徴は、荷を吊り上げた後の運搬ルートの決定や運搬中の吊り荷の制御を、大幅に自律化したことです。
オペレーターが運搬の目的地点を指定すると、AI(人工知能)が吊り荷の形や大きさ、障害物の有無から最適な運搬ルートを自動生成し、運転を始めます。
運転中に現場の状況をリアルタイムに監視するのが、クレーンのアーム先端に取り付けた「LiDAR」で計測した点群データやカメラ映像です。吊り荷に障害物が接近した時は、減速や停止、運搬ルートの再作成を行い、安全運転に務めます。

LiDARからのリアルタイム点群で、吊り荷周辺の状況を監視するイメージ
運転中にシステムが吊り荷の揺れを検知したときは、クレーンが自動的に揺れを抑える動作を行います。また荷下ろし時には、ジャイロ効果を活用した吊り荷の方向制御装置「スカイジャスター」と、カメラ映像のAI認識やGNSS(全地球測位システム)による方向制御、そしてBIM(ビルディング・インフォメーション・モデリング)データを元に吊り荷の向きを自動制御します。
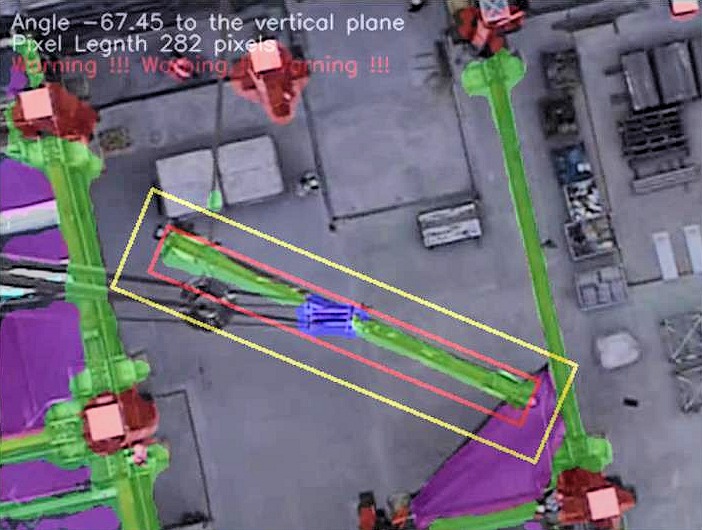
AIで吊り荷や障害物を自動認識できる
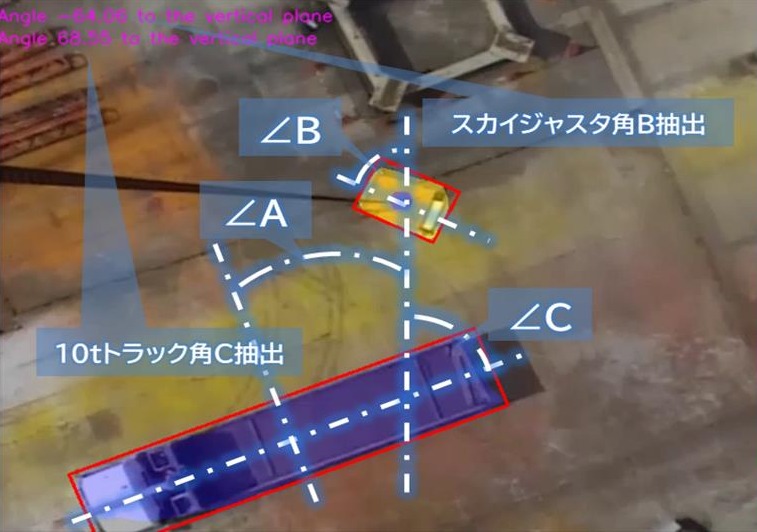
トラックの荷台の向きに合わせて、吊り荷の方向をスカイジャスターで自動制御するイメージ
そして、トラックなどに吊り荷を下した後は、システムから自動玉掛け装置に指示を送信すると、
玉掛けワイヤーを自動で外す
ことができます。
これまでは吊り荷の揺れを抑えたり、玉掛けを外したりする作業を人力で行ってきましたが、これらを自動化することで作業員の安全性や効率が大幅に向上しました。
オペレーターはパソコンやタブレットから操作でき、モニターは1画面に集約されています。そのため、オンライン会議システムによって、クレーンの運転をテレワークで行うことも可能です。

オンライン会議システムによって、クレーンの遠隔操作を行っているところ
このシステムによって、クレーンの運転業務についての労働生産性は、「数倍」の単位で飛躍的に向上しそうですね。