管理人のイエイリです。
完成したダムの堤体内部には、「監査廊」というトンネルが設けられており、コンクリートのひび割れや漏水の有無などを調べるため、係員が定期的に巡回点検を行っています。
しかし、急勾配の階段が連続しているので、この上り下りが大きな肉体的負担になっており、転落などの危険もあります。
こうした課題を解決しようと、大林組はSpiral(本社:東京都葛飾区)の協力を得て、施工中の重力式コンクリートダム、川上ダム(三重県伊賀市)で点検作業を省力化、省人化する実証実験を行いました。
監査廊の点検に使ったのは、
ナ、ナ、ナ、ナント、
屋内型ドローン
なのです。(大林組のプレスリリースはこちら)

川上ダムの堤体内部に設けられた監査廊の階段に沿って上っていくドローン(特記以外の写真、資料:大林組)
監査廊内を飛行するドローンのイメージ
飛行ルートには無線LANが設置されており、ドローンに搭載したカメラからの映像をリアルタイムに遠隔地のパソコン送って点検箇所の状況を確認できます。
また専用のWebアプリケーションによって、過去の映像履歴や機体周辺の温湿度、バッテリー残量などの情報や、大まかな飛行位置を記録できます。
このデータを時系列的に記録することで、長期にわたる監査廊壁面などの経年変化も容易に比較することが可能です。
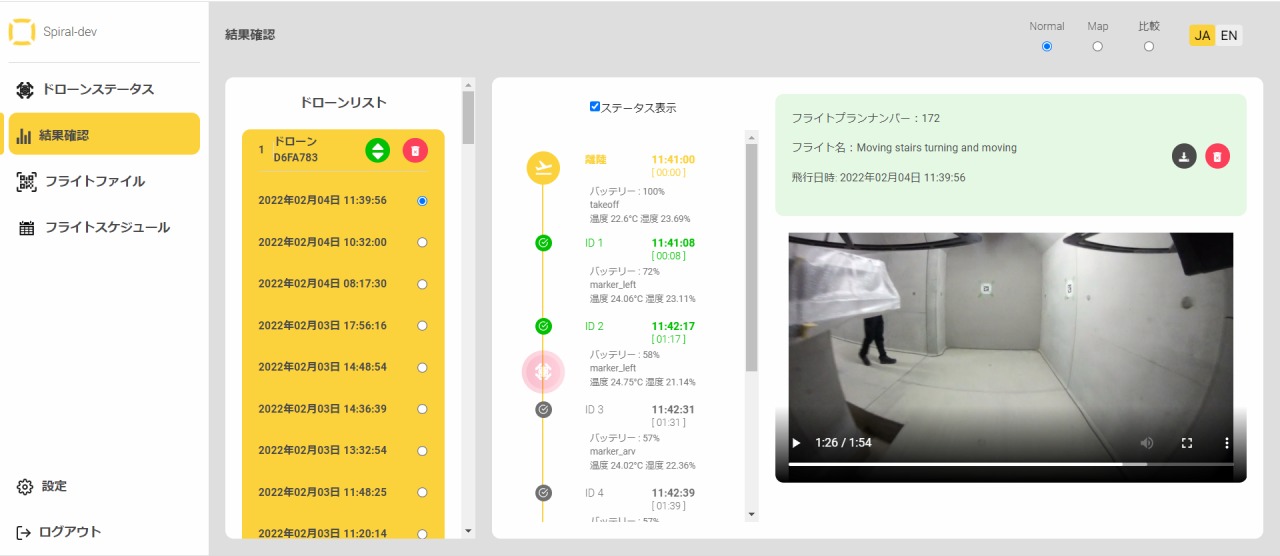
専用Webアプリケーションの画面。監査廊内の映像が記録される
分厚いコンクリートで囲まれた監査廊内では、当然、GNSS(全地球測位システム)は使えません。
また、監査廊内には同一形状の階段などが連続しているので「特徴点」が少なく、「SLAM」と呼ばれる自己位置推定手法は使えません。
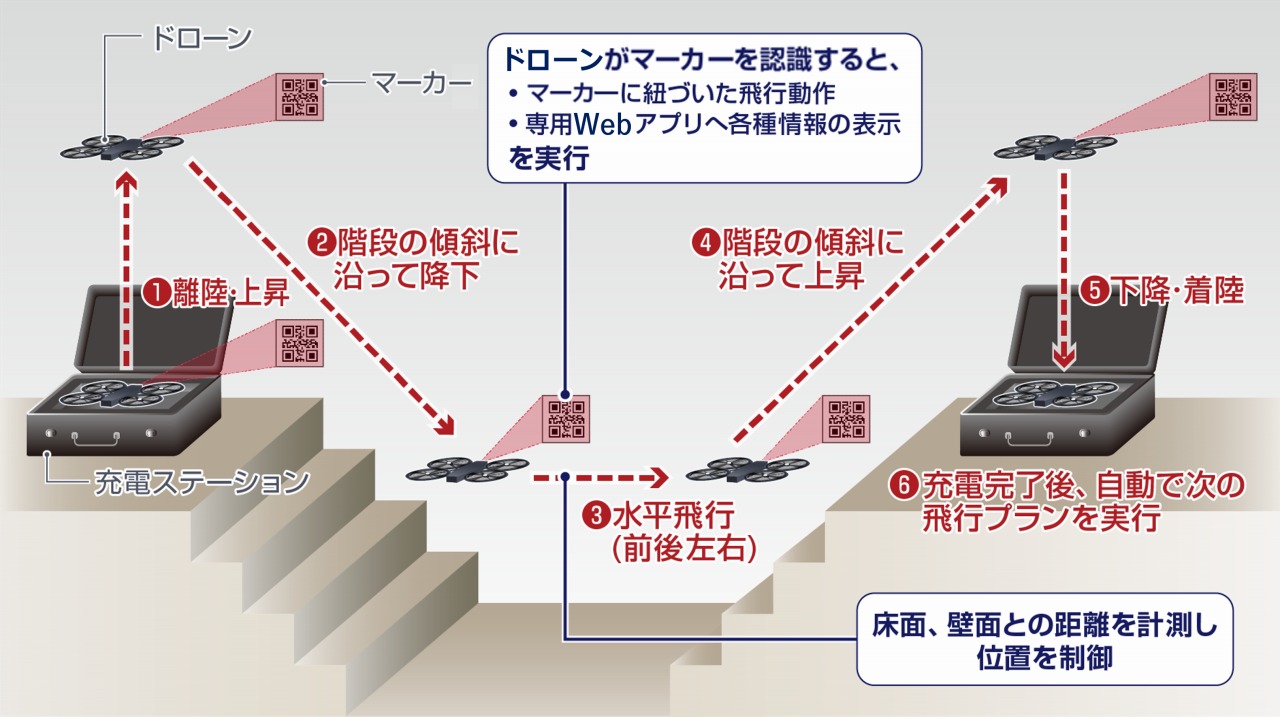
そこで、階段の視点や終点、曲がり角など飛行動作が変化する地点には、飛行動作の指令がひも付けされた「マーカー」を配置し、飛行を制御しました。
ドローンにはレーザーセンサーが搭載されており、機体と床面、壁面と距離を常に計測しながら、マーカーでの指示に従って安定して飛行できます。
この飛行制御システムには、Spiralの特許技術である「MarkFlexAir」が使われました。
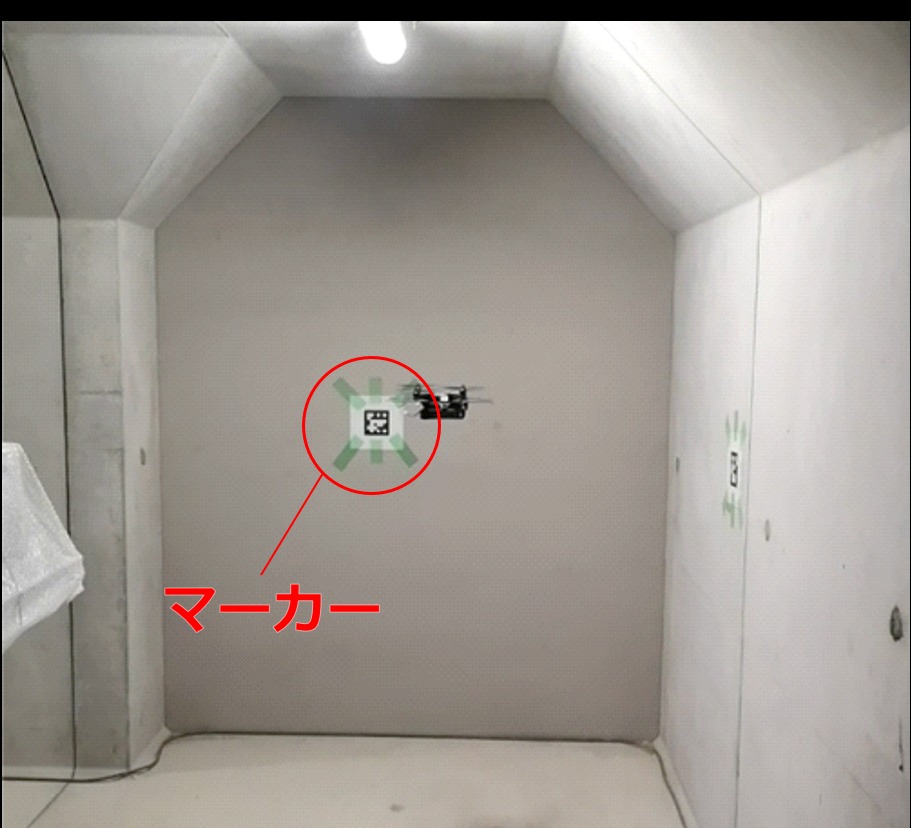
監査廊内で、飛行動作が変化する地点に設置された「マーカー」
川上ダムは堤頂長334m、堤高は84mあります。この内部に設けられた監査廊はひとまわりすると、約1kmもの距離を飛行しなければならず、バッテリーがもちません。
そのため、飛行ルートの要所には
充電ステーション
を配置し、ドローンはここに離着陸して充電を繰り返しながら自動飛行を行います。
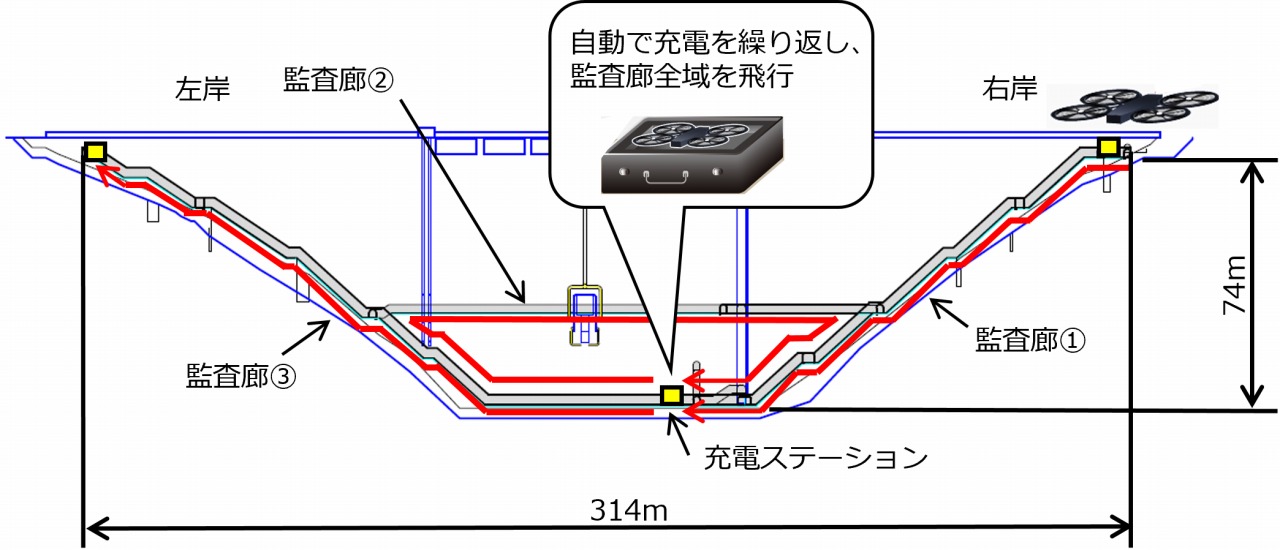
要所に配置された充電ステーション
今後の開発では、AI(人工知能)による壁面クラックの自動検出や、ダムの堤体を押し上げようとする揚圧力メーターの数値の自動読み取りや装置の自動制御などに取り組みます。
また、技術の水平展開として、監査廊以外でGNSSが使えない環境での、点検作業への適用も検討していくとのことです。
建設業やインフラ管理の分野では、GNSSが使えない場所で、ドローンを飛行させたいことがよくあります。マーカーを使った飛行の制御はシンプルで、人間にもわかりやすいので、いろいろな現場で活用できそうですね。