管理人のイエイリです。
人手不足への対応や、生産性向上のため、建築現場の進捗管理などを遠隔化する動きが加速しています。
その時、問題になるのが、現場を写すカメラをどこに配置するかです。
現場内にWEBカメラを設置する方法だと、見られる範囲が大幅に制限されたり、死角が発生したりします。
また、四つ足歩行ロボットやアバター型ロボットにカメラを搭載する方法だと、移動しにくい場所が生じたり、高いところが見えにくかったりという問題も出てきます。
センシンロボティクス(本社:東京都品川区)とSkydio(本社:東京都港区)はこのほど、こうした建築現場の課題を一気に解消してくれる遠隔管理方法について、実証実験に成功したことを相次いで発表しました。
両社に共通しているのは、
ナ、ナ、ナ、ナント、
ドローンによる室内飛行
によって、建築現場を自由自在に飛び回り、必要な部分を確認するという方法なのです。(センシンロボティクスのプレスリリースはこちら、Skydioのプレスリリースはこちら)

東洋建設が施工中の(仮称)東京情報デザイン専門大学新設工事(東京都江戸川区小松川)の階段部分を移動するドローン(写真:センシンロボティクス)

大林組のビル現場を飛行するドローン(写真:Skydio)
センシンロボティクスは東洋建設と、Skydioは大林組と連携し、それぞれのビル現場でSkydioの自律飛行型ドローンを使って、進捗管理などを遠隔で行う実証実験を行いました。
これらの実験に使われたドローンは、Visual-SLAMという技術で、GNSS(全地球測位システム)の電波が届かない室内でも、ドローンが自己位置を推定しながら飛ぶことができます。
あらかじめ飛行ルートを設定しておくと、階段などの狭い通路も自律的に飛行し、施工中に天井からぶら下がる配線などの障害物があっても、AI(人工知能)によって自動的に回避できました。
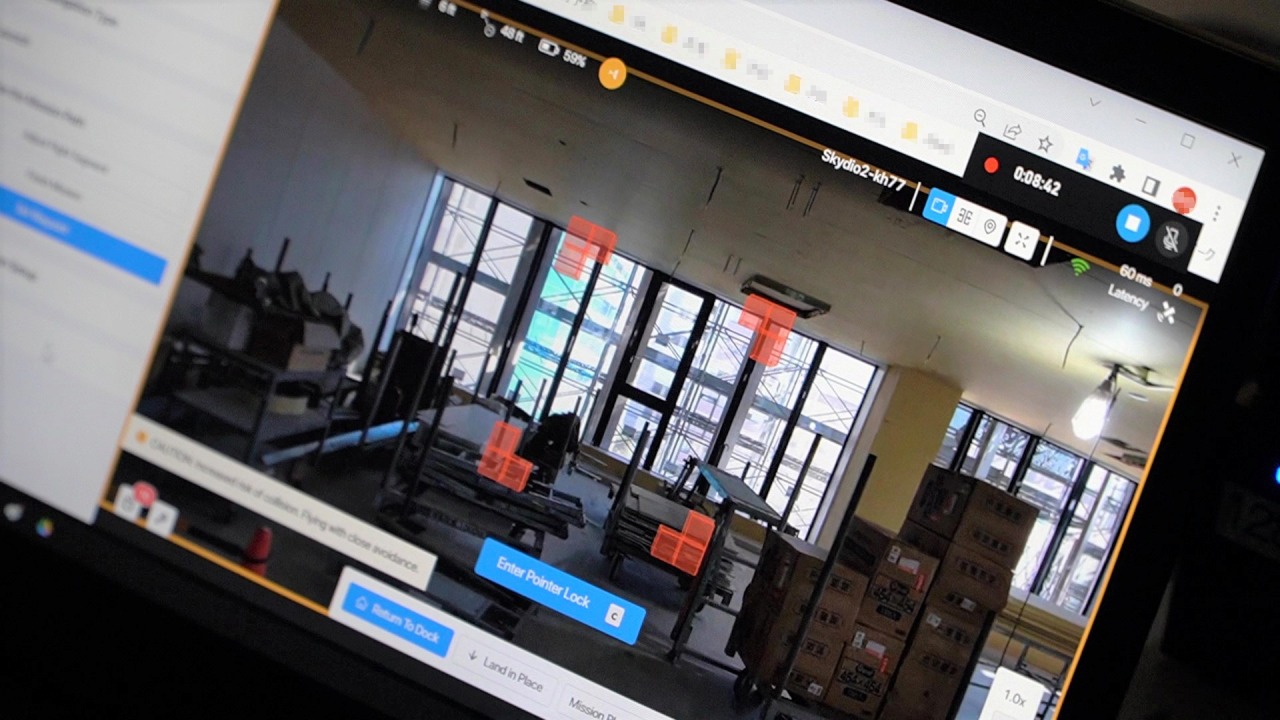
ドローンを遠隔操作する端末の画面(写真:センシンロボティクス)

東洋建設本社から、ドローンを遠隔操縦した(写真:センシンロボティクス)

天井裏の映像。現場で足場に乗って見たようによくわかる(写真:センシンロボティクス)
また東洋建設の現場では、ドローンが撮影した画像データを、クラウド上のBIM(ビルディング・インフォメーション・モデリング)とリンクさせて確認できるシステムも開発しました。

クラウド上のBIMモデル(資料:センシンロボティクス)

BIMモデルと同じ位置で撮影した現場の写真(写真:センシンロボティクス)
ドローンが遠隔操作できると言っても、飛行のたびに現場の職員がドローンを充電し、現場に運んでいると、新たな手間ひまが発生してしまいますね。
そこで両現場では、
ドローンの“すみか”
とも言える「Skydio Dock」を現場に設置し、離着陸や飛行後の充電を自動化することにも成功しました。

ドローンが自動的に離着陸し、充電も行う「Skydio Dock」(写真:Skydio)
近い将来、ドローンは建築現場に住み込みで働くことになりそうですね。