管理人のイエイリです。
水力発電所などにある水路トンネルは、国から3年に一度の調査点検が義務付けられています。
他の構造物と同様に、「近接目視」などによってトンネル内面の覆工のひび割れや漏水などを把握する必要があるため、これまでは人が内部に入って目視点検や異常箇所のスケッチなどを行っていました。
しかし、人間がトンネル内に入る点検方法だと、点検者の安全や身体的な負荷などのリスクやコスト・手間がかかっていました。
こうした課題を解決するため、西松建設と佐賀大学の伊藤研究室は、自律走行式水路調査ロボット「turtle」を開発しました。

自律走行式水路調査ロボット「turtle」の全景(以下の写真、資料:西松建設)
このロボットは、直径6m、長さ2km程度のトンネルを調査することができますが、その特長は、
ナ、ナ、ナ、ナント、
トンネル内を3Dモデル
化できることなのです。(西松建設のプレスリリースはこちら)

トンネル内部の3Dモデル(左)と内壁の展開図(右)
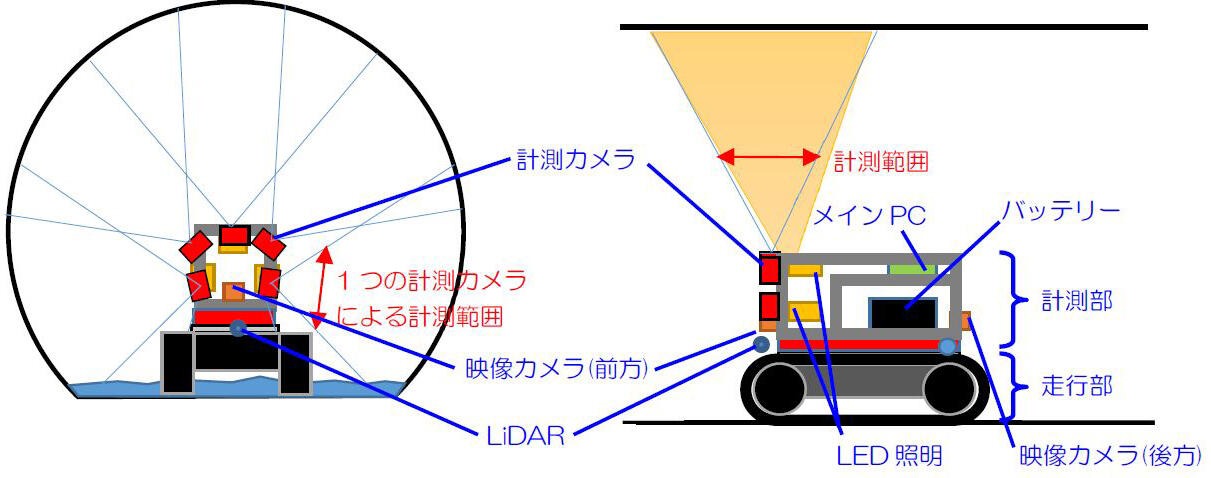
水路調査ロボットによる計測イメージ。5台のカメラでトンネル内面を高解像度の画像で記録する
このロボットは、自律走行可能な走行部と、各種カメラや照明、バッテリーなどの計測部で構成されています。
走行部には、LiDARが付いており、壁面との位置関係を把握しながらトンネルの中心線に沿って自律走行が行えます。
一方、計測部には高解像度のカメラ5台を、トンネル断面方向に半円状に配置し、トンネル壁面の高解像度写真を撮影します。この写真データから、フォトグラメトリー(SFM)ソフトウエアによって3Dモデルを作成するというわけです。
また、前後には広角レンズ付きカメラを1台ずつ搭載しており、坑内の漏水や異常箇所を映像として記録できるようになっています。
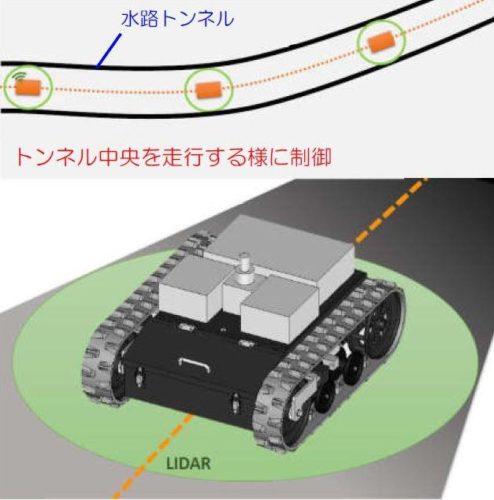
前後のLiDARによってトンネル中心線をキープして自律走行する
トンネル内部の3Dモデルの同時に、内壁の展開図も作成します。
この展開図から、0.1mm幅以上のひび割れを、
AIで自動検出
することもできます。
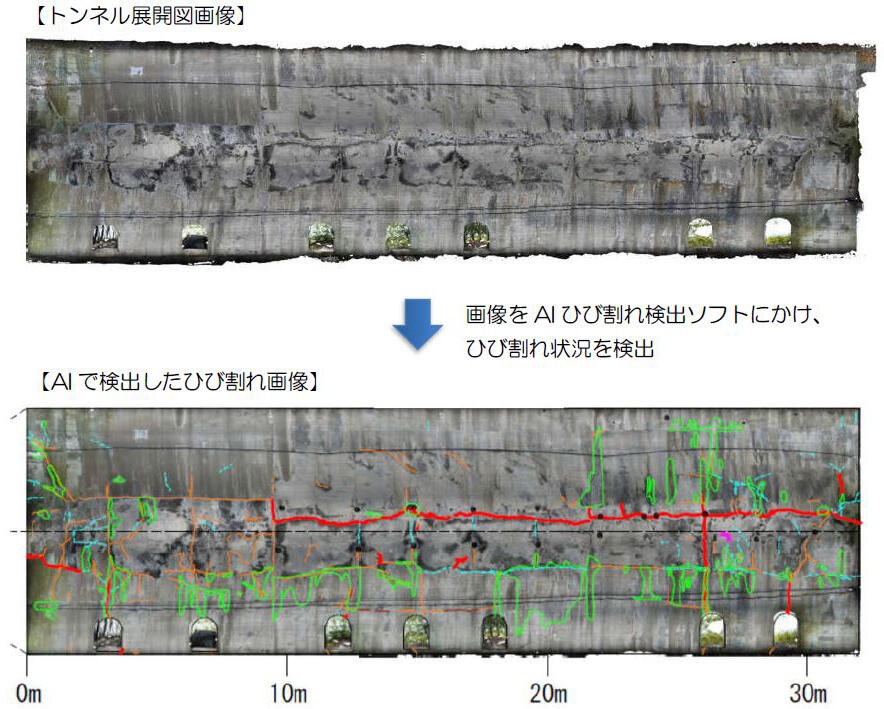
トンネル内面の展開図画像(上)からAIによってひび割れを自動検出した例。トンネル内の位置もわかる
水路トンネルや下水道管きょ内の点検には、最近、ドローン(無人機)も使われていますが、積載できる重量の制約によって飛行時間が短かったり、管内の風によって機体の制御が難しかったりすることもあります。
その点、このどっしりした水路調査ロボットなら、「turtle」(=カメ)の名のように、トンネル全体をゆっくり、じっくりと安定的に調査できそうですね。