管理人のイエイリです。
ビル工事に欠かせないタワークレーンは、時々刻々と変わる現場の状況に応じて、必要な資材を必要なところに届けるという「物流の要」を担っています。
そのため、タワークレーンで資材を吊り上げたり移動させたりする「揚重作業」が、工事全体の進ちょくを左右すると言っても過言ではありません。
一方、タワークレーンの熟練オペレーターも、他の建機と同じく、少子高齢化の影響で不足しつつあります。

ビル工事現場に設置されたタワークレーン(以下の写真、資料:戸田建設)
そこで戸田建設は、タワークレーンの揚重作業を自動化することを目指しており、このほどその第1弾となる「2次元自動誘導システム」が実用化されました。(戸田建設のプレスリリースはこちら)
タワークレーンの腕の部分にあたる「ブーム」の起伏や旋回を
ナ、ナ、ナ、ナント、
CADとGNSSで自動制御
するシステムなのです。(※GNSS:全地球測位システム)
タワークレーンの運転席にはタブレットパソコンが設置され、オペレーターは画面に表示されたCAD図面上で、資材などを吊り上げる「荷取り位置」と、吊り下ろす「取り付け位置」をタップして指定します。
すると吊り荷を運搬するのに必要なブームの起伏や旋回時間が自動計算され、ブームの先端を取り付け位置まで最短ルートで自動的に動かします。
目的の位置に近づくと、ブームが自動的に減速し、荷ブレを抑制する機能も付いています。
 タプレットパソコンを操作するオペレーター |
 CAD画面上で荷取り位置と取り付け位置をタップで指定する |
これまでは、荷の吊り上げ場所や目的地などに配置された誘導員の指示によって、オペレーターが試行錯誤的にブームを動かし、徐々に位置決めを行っていました。
このシステムだと一発でブームの起伏と旋回の量が決まるので、経験の少ないオペレーターでも効率よく揚重作業が行えるほか、省エネルギーにもつながります。
一発で位置が決まるところは、3Dマシンコントロール付きのICTバックホーやICTブルドーザーと同じで、効率化や省人化、省エネ効果なども似ていますね。
また、クレーンの自動制御で、吊り荷が目的地の上でピタッと吊り下ろされても、ぐるぐると回転していると面倒です。
そこで戸田建設では、高速回転するフライホイールのジャイロ効果で、吊り荷の旋回や角度を制御する「ジャイアン」という装置を、既に開発しています。(戸田建設のプレスリリースはこちら)
これを使うと、鉄骨梁1本の設置に要する時間が
3分の1に短縮され
作業が大幅にスピードアップされるそうです。
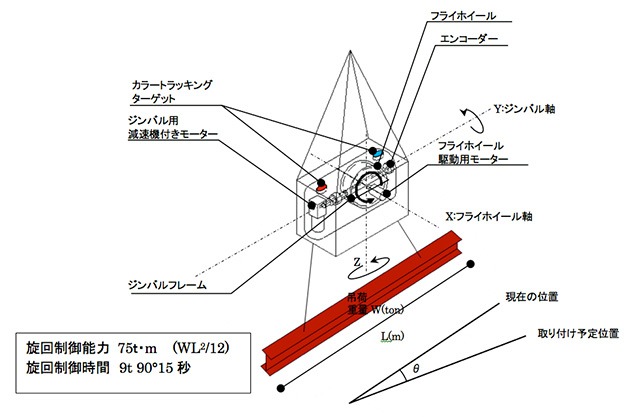
フライホイールのジャイロ効果で吊り荷の旋回を制御する「ジャイアン」

ジャイアンを使用している現場の状況
今回の開発で、クレーンによるXY方向の位置決めはクリアしました。戸田建設では今後、吊り上げ・吊り下げというZ方向の自動制御技術を開発し、「3次元自動誘導」の実現を目指すそうです。
これが実現すると、タワークレーンは吊り荷位置のXYZ座標と、吊り荷の向きを完全に自動制御できるようになり、まさに現場におけるCNC(コンピューター数値制御)自動位置決めロボットとして進化することになります。
ビル工事のロボット化は、着実に進んでいるようですね。