管理人のイエイリです。
社会インフラの老朽化が進む中、既存構造物の点検や維持管理がますます重要になっています。
なかでも斜張橋の橋桁を支えるケーブルは、高い場所に架設されているうえ断面が丸いので人が近づきにくく、“近接目視”点検作業が行いにくいという問題がありました。
そこで三井住友建設と山口大学は、ロボットによる斜張橋ケーブル点検の実証実験を、埼玉県越谷市にあるPC3径間連続エクストラドーズド橋の「せいたかしぎ橋」で行いました。

埼玉県越谷市のせいたかしぎ橋で行われたケーブル点検の実証実験(以下の写真、資料:三井住友建設)
使われたロボットは、茨城工業高等専門学校と山口大学が共同開発した「斜張橋ケーブル点検ロボット」で、ケーブルをよじ登る手段として、
ナ、ナ、ナ、ナント、
ドーナツ型ドローン
を使っているのです。(三井住友建設のプレスリリースはこちら)

茨城工業高等専門学校と山口大学が共同開発した「斜張橋ケーブル点検ロボット」
上の写真のようにロボットは撮影ユニットとケーブル断面を囲むような形のドローン(無人機=昇降ユニット)に分かれています
このドローンは撮影ユニットをケーブル上部までスピーディーに押し上げると、すぐに降りてきます。
一方、撮影ユニットは内蔵された4台のビデオカメラでケーブル全周をくまなく撮影しながら、最大分速9mのゆっくりしたスピードで降りてきます。
その間、ドローンは別の撮影ユニットを次々と別のケーブルに押し上げることができるので、ケーブル撮影を同時並行で進めていくことができるのです。
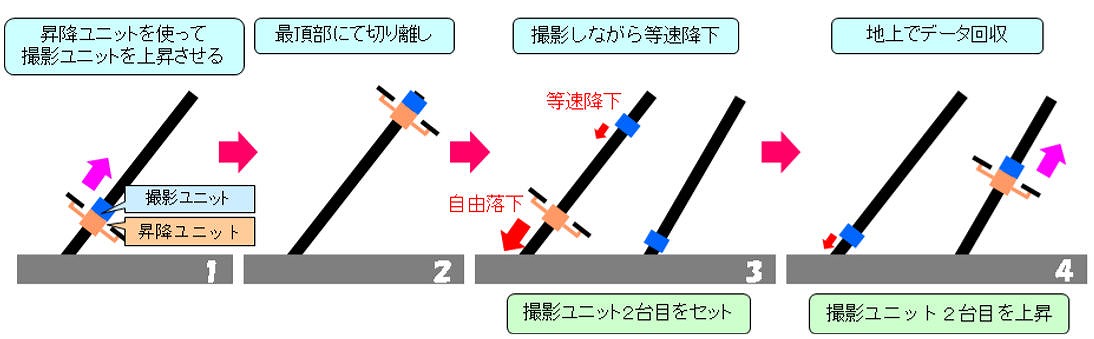
ロボットによるケーブル点検の作業手順
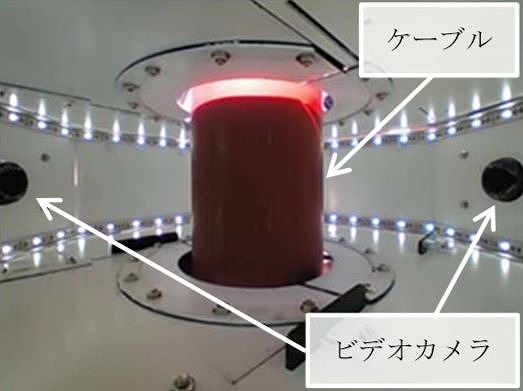
内部に4台のビデオカメラが組み込まれた撮影ユニット
4台のカメラが撮影した画像は、地上で回収すると画像結合システムによって約10分でパノラマ画像化し、ケーブル損傷部分の位置や程度をその場で確認することができます。
画像はケーブル全周から撮影しているので死角がなく、
目視点検と同等レベル
の観察ができることが確認されました。
今回、実証実験を行ったせいたかしぎ橋のケーブル傾斜角度は約15°とゆるい勾配でしたが撮影ユニットやドローンの自動落下には問題がなく、あらゆる傾斜角度のケーブルで点検が可能なこともわかりました。
国内最大規模のPC斜張橋には、約150m長のケーブルが付いていますが、その場合でも約30分で点検作業が可能とのことです。
現場をいったん、画像というデータで記録し、それをチェックするという作業フローができると、人間の代わりにAI(人工知能)に異常部分の絞り込みを行わせることもできそうですね。
今回のシステムは、斜張橋の維持管理をIoT(モノのインターネット)化することにもつながりそうです。