



管理人のイエイリです。
鉄道工事と言えば、列車が通らない夜間に、数時間ずつの作業を進めていくことが求められます。
また現場のスペースも限られており、人間の手作業に頼った作業もたくさんあります。
今後、人手不足問題が深刻になってくると、マンパワーの確保も相当な大変さが予想されます。
こうした問題を克服しようと、ロボットベンチャーのイクシス(本社:神奈川県川崎市)と東日本旅客鉄道(JR東日本)は画期的なシステムを開発しました。
工事用のロボットとBIM/CIMモデルを連動させ、
ナ、ナ、ナ、ナント、
鉄道工事をテレワーク化
しようというシステムなのです。(イクシスのプレスリリースはこちら)
※BIM/CIM=ビルディング・インフォメーション・モデリング/コンストラクション・インフォメーション・モデリング
工事用ロボットを遠隔操作するコントローラーの画面(以下の資料:イクシス)
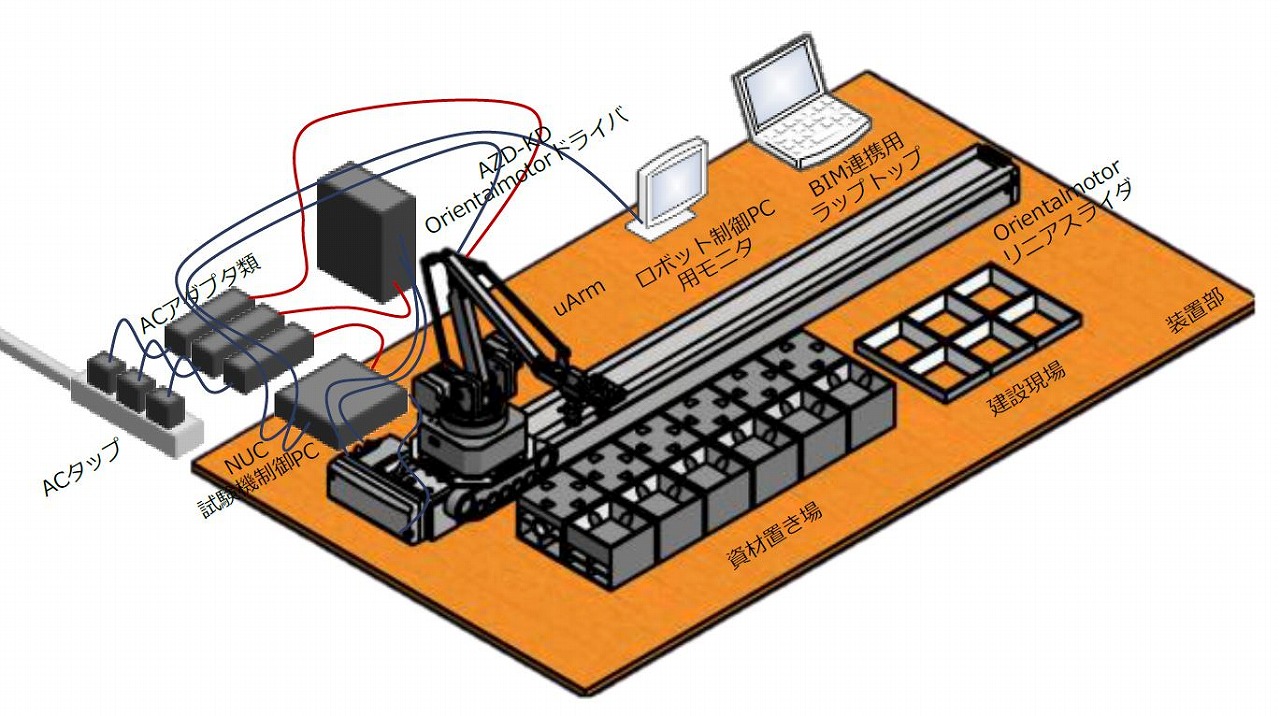
実験に使われた試験装置。アーム付きのロボットがプラットフォーム部材をつかみ、現場に設置することを想定した
実験は駅のプラットホーム建設をブロック積立工法で行うことを想定し、模型を使って行われました。
アーム付きの移動式ロボットをコントローラーで遠隔操作して、資材置き場でホームのブロック部材を持ち上げ、所定の場所に設置するというものです。
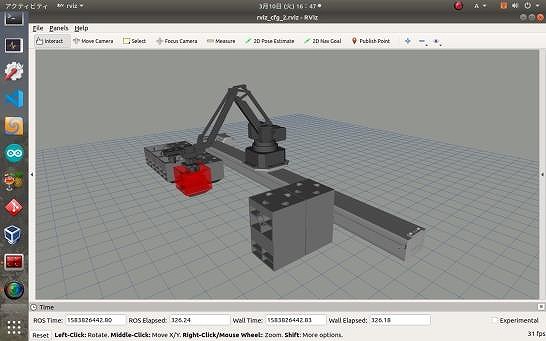
ロボットを制御するROS(Robot Operating System)とBIM/CIMモデルを双方向に連携し、リアルな現場の動きをバーチャルなBIM/CIMモデル上でリアルタイムに把握することができます。
模型による実験ですが、様々なことがクリアされました。
例えば、(1)ロボットの位置姿勢情報とBIM/CIMモデル空間との座標マッチングや(2)BIM/CIMモデル空間での資材置場(始点)から建設箇所(終点)への資材運搬のルート設定、(3)指定された資材ルートからROS上でのロボットの行動計画生成および動作です。
リアルなロボットや資材の動きが周囲の障害物にぶつからないように、精密なBIM/CIMモデル上で確認することができ、安心してスピーディーな作業ができそうですね。
このほか、(4)ROSによるロボットの動作や資材の位置姿勢情報を、BIM/CIMにリアルタイムに反映する、(5)ロボットに搭載された現場カメラ映像のリアルタイム配信、(6)建設開始や停止などの操作や進捗率などのグラフィカルな表示、といった施工管理や安全管理に関する技術についても完成させました。
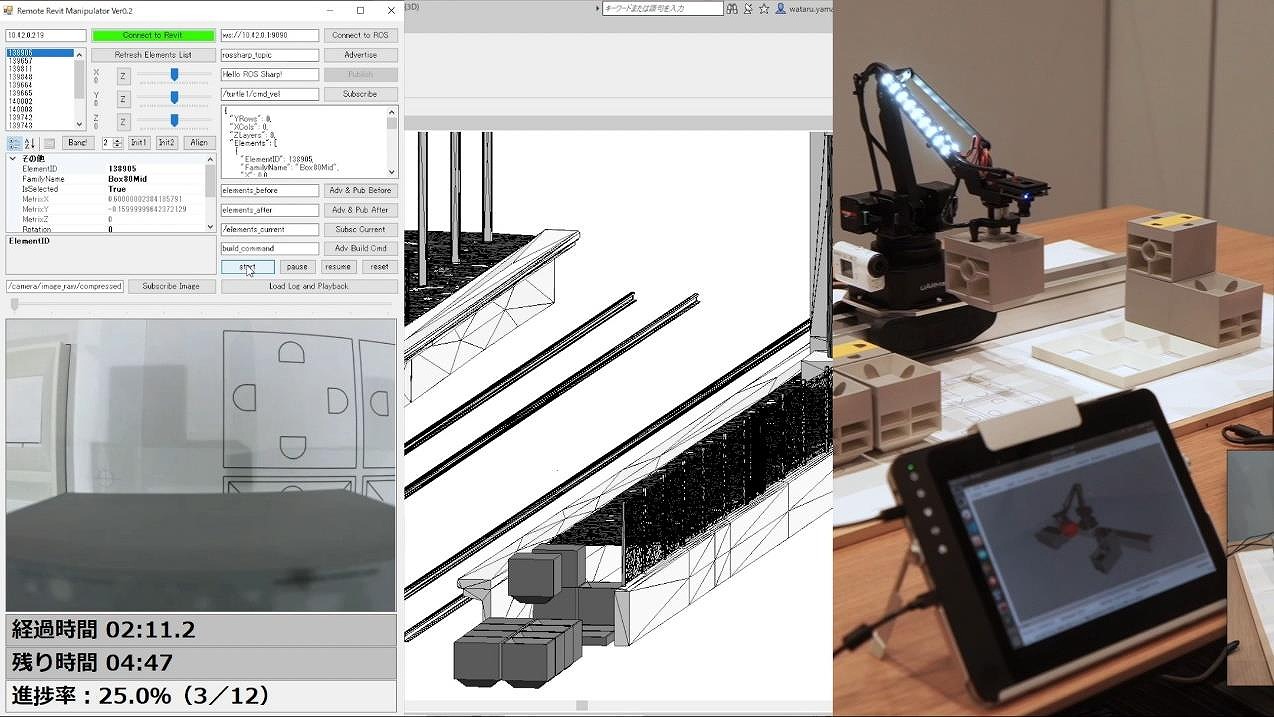
現場のカメラ映像や施工管理情報(左)、BIM/CIMモデル(中央)、現場(右)がリアルタイムに連動する
今後は開発した遠隔操作や遠隔監視、出来高管理一元化システムをさらに拡張し、いよいよ実現場での有効性を確認していくとのことです。
このシステムは鉄道工事の
デジタル革命を実現
するものと言えるでしょう。
※DX=デジタルトランスフォーメーション
今後、技術者や作業員が不足が年々厳しくなる中、鉄道分野でも着々と省人化への取り組みが進んでいきそうです。












