管理人のイエイリです。
建設現場用のさまざまなロボットを開発してきたイクシス(本社:神奈川県川崎市)はこのほど、現場用の自動巡回ロボットシステム「i-Con Walker」を開発しました。

現場用の自動巡回ロボットシステム「i-Con Walker」(以下の写真、資料:イクシス)
よく見ると、ロボットの上には何やら黒い物体が付いています。
ナ、ナ、ナ、ナント、
3Dレーザースキャナー
を搭載していたのです。(イクシスのプレスリリースはこちら)

3Dレーザースキャナーで現場の点群を自動計測する機能が付いていた
BIMモデル上で経路を設定し、点群計測を行う場所を指定すると、後はこのロボットが自動的に現場を巡回し、指定された点群データを取ってきてくれるのです。

ロボットが計測してきた点群データの例
そしてロボットが計測してきた点群データを、BIM(ビルディング・インフォメーション・モデリング)ソフト「Revit」②読み込み、半自動的に現況BIMモデルに変換します。
すると日々の出来高や出来形、点検結果をリアルタイムにBIMモデルに反映し、施工管理に活用できるのです。

点群データから半自動で作成された最新のBIMモデル
そして最新の状態になったBIMモデル上で、次回の巡回経路を指定します。
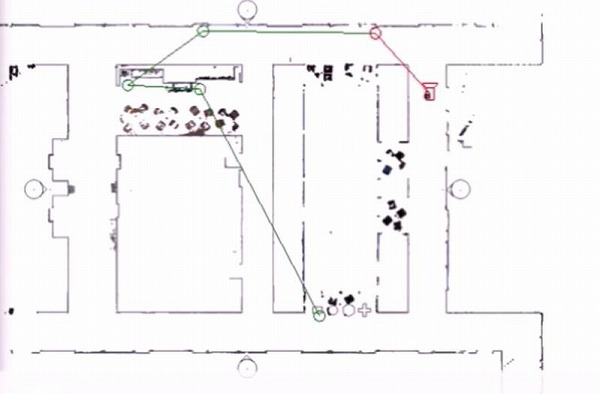
最新のBIMモデルから作った次回の巡回経路。点群計測を行う場所なども指定しておく
つまり、このシステムでは日々、変化する現場を計測した
点群とBIMが双方向連携
し、現場の「デジタルツイン」(デジタルの双子)ともいうべき、常に最新のBIMモデルが作れるというわけです。
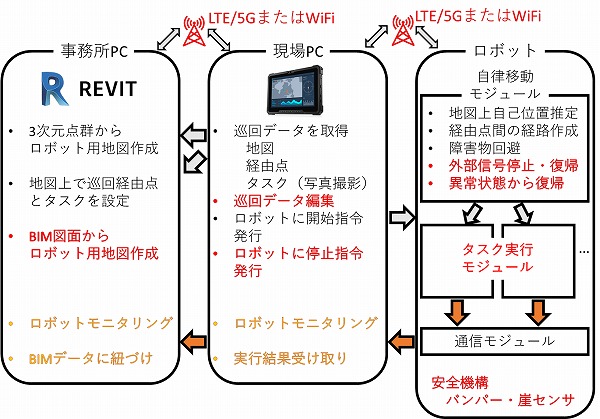
システム構成図
施工管理業務をテレワーク化するとき、360°写真や点群データだけだと定量的な扱いが難しい面もありますが、最新のBIMモデルがあれば、工事の進捗(しんちょく)率や出来高などを数値として出しやすくなりますね。
現場ではいよいよ、BIMとロボットの連携が始まったようです。