管理人のイエイリです。
工事現場内で資材などを搬送する自律走行型ロボットの活用が進みつつありますが、面倒なのはロボットが通る経路設定の作業です。
これまではロボットが走行するルート指定を現地で行っており、移動範囲の設定にはカラーコーンなどを置く必要がありました。
しかし、現場では時々刻々と状況が変化するため、その都度、現場で設定を変更するのは大変な手間ひまがかかっていました。また、ロボットの種類ごとに設定の方法も違います。
そこで竹中工務店は、多数のロボットの操作や管理を簡単にするため、「建設ロボットプラットフォーム」を開発しました。
その特長の一つは、ロボットの移動ルートなどを
ナ、ナ、ナ、ナント、
BIMデータで設定
できることなのです。(建設ロボットプラットフォームのウェブサイトはこちら)
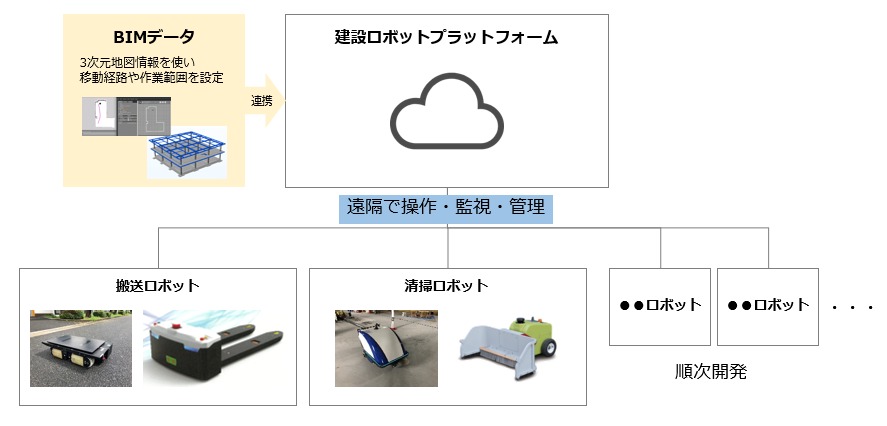
BIMデータと連携する「建設ロボットプラットフォーム」のイメージ図(以下の資料、写真:竹中工務店)
現場の地図情報としてBIM(ビルディング・インフォメーション・モデリング)データを使い、クラウド上で経路シミュレーションを行い、ロボットに遠隔でルート指示を行えます。
また、ロボット自体も自己位置推定と環境地図作成を同時に行う「SLAM技術」によって最適な経路を選択し、自律的に走行・動作が行えます。
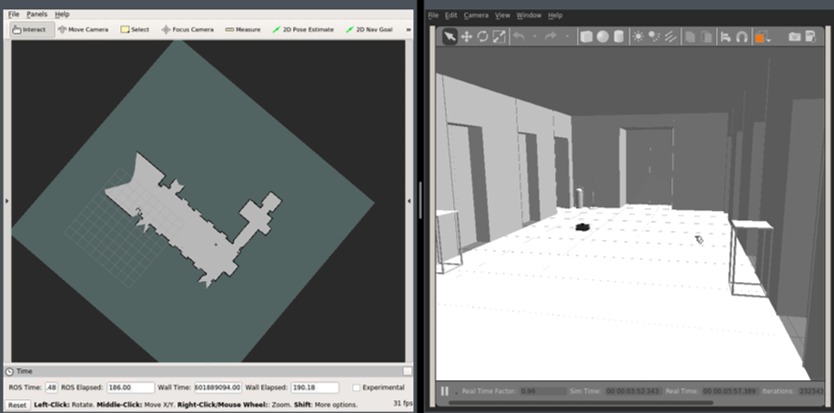
BIMデータ上でシミュレーション(右)を行い、作成されたロボット用の地図(左)
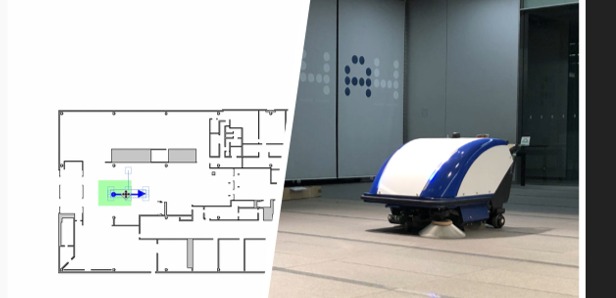
竹中工務店とカナモトはこのほど、建設ロボットプラットフォームと、アスラテック(本社:東京都港区)が国内展開する香港製の自律走行型配送ロボット「RICE(ライス)」を使い、2階建ての工事現場内で資材配送を行う実証実験を行いました。

実験に使われた自律走行ロボット「RICE」

建物内を走行して資材を配送中の様子
この実験では、手動での地図作成を行わず、BIMだけで経路設定を行いました。
このほか、
本設エレベーターとの連動
も行いました。(竹中工務店のプレスリリースはこちら)
1階の充電ステーションに置かれたRICEが、自分自身でエレベーターに乗り込んで2階に上がり、所定のエリアまで移動して資材を受け渡し、再び1階の充電ステーションに戻りました。

自分自身でエレベーターに乗り降りする「RICE」
エレベーターは三菱電機製で、仮設でIoT機器を取り付け、ロボットが乗る時は、エレベーター前から建設ロボットプラットフォームを通じて、三菱電機のIoTプラットフォーム「Ville-feuille(ヴィルフィーユ)」に指示を出し、エレベーターを呼びます。
ロボットが降りた後は、通常のエレベーターの運用状態に戻ります。
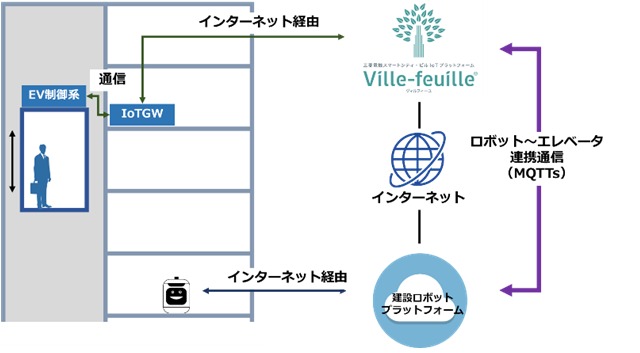
建設ロボットプラットフォームとVille-feuilleの連携イメージ
この建設ロボットプラットフォームやロボット自体は、建物完成後にも施主が引き継いで使うことができます。
建物の設計段階でロボットの走行シミュレーションを行っておくと、ロボットの待機場所や充電ステーションの位置、ロボットの走行を考慮した通路や出入り口、スロープなどを、設計に反映することができ、ロボットがスムーズに使える建物になります。
これからの建物には、ロボットを使いやすいシステムやバリアフリー仕様の導入も、考慮していく必要がありそうですね。