管理人のイエイリです。
3Dレーザースキャナーは、既存の建物や橋などに無数のレーザー光線を当てて、表面の3D座標を無数の「点群データ」によって計測する測量機器です。
図面がない構造物などを計測して、図面を作るといった業務にも使われます。
ところがオフィスケイワン(本社:大阪市西区)がこのほど開発した「点群取得シミュレーター」は、
ナ、ナ、ナ、ナント、
3Dモデルから点群を作成
するという、一見、頭をかしげるようなシステムなのです。(オフィスケイワンのプレスリリースはこちら)
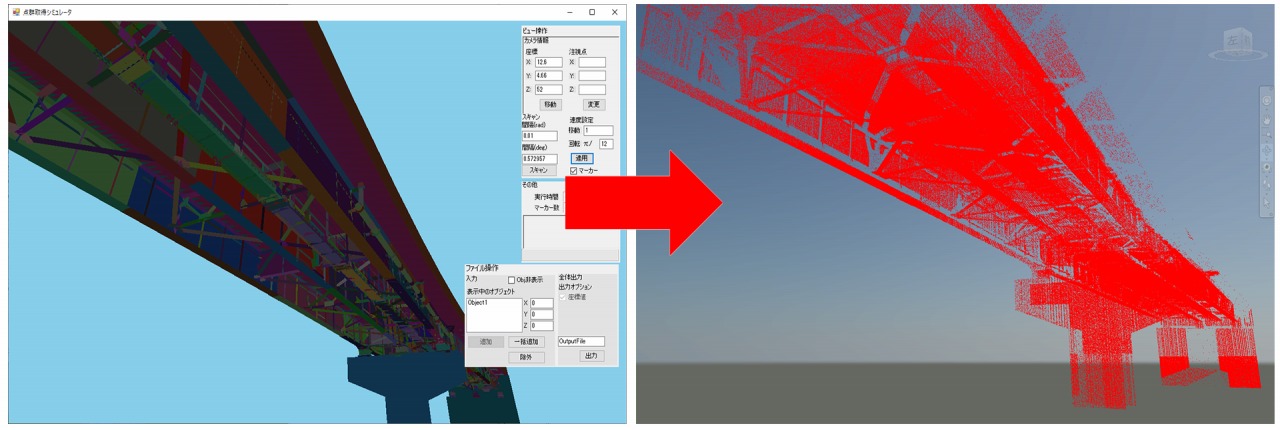
3Dモデルから点群データを作成する「点群取得シミュレーター」(以下の資料:オフィスケイワン)
「もともと3Dモデルがあるなら、点群なんか取る意味ないやんか」と、思わず突っ込みたくなるシステムですが、実は作成された点群自体にはあまり意味はありません。
ご存じのように、3Dレーザースキャナーは、下の図のように部材の陰に隠れた部分の点群は取得できません。
そのため、複雑に部材が入り組む橋梁などでは、現場で計測作業を行った後に、点群が取れていない部分が明らかになって、もう一度、計測に行くという手戻りが発生することが発生していました。
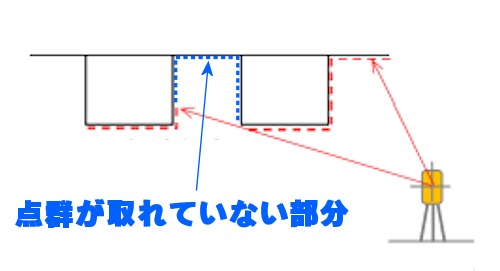
3Dレーザースキャナーは、部材の陰になった部分の点群を取得できない
そこで、この点群取得シミュレーターでは、「鈑桁橋」や「箱桁橋」、「トラス橋」など、これから測量しにいく橋の形式に似た3Dモデルを使って現場を再現し、3Dスキャナーの計測位置を決めて点群を作ってみることができます。
そして3Dモデルと重ねてみることで、取れていない点群があれば計測位置をずらしたり、増やしたりすることで事前に必要な点群が取れるかどうかを確認できるのです。
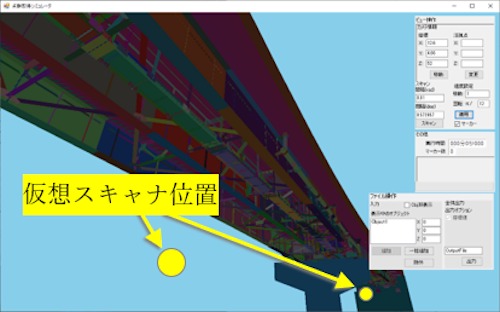
これから計測しに行く橋と同じような形式の3Dモデルで、現場を再現する
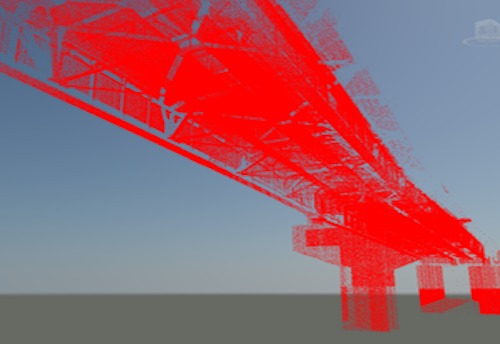
3Dスキャナーを据え付ける位置を決めて、点群データを取ってみる
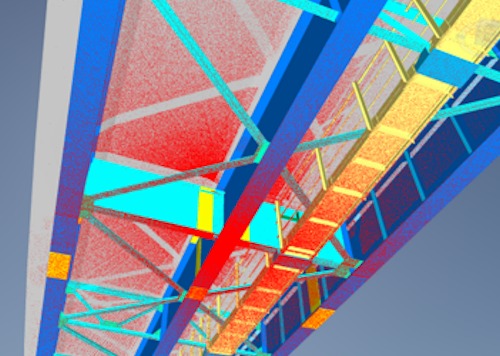
取った点群データを3Dモデルに重ねて見ることで、計測漏れのある場所がないかを事前に確認する
こうしたシミュレーションによって、再計測という
手戻りをなくす
ことが、このシステムの真の狙いなのです。スキャン数をできるだけ少なくできる計測位置を決めることもできます。
点群の密度は、実際の機器と同じように高密度、標準、低密度から選択できるほか、今後は点群の色取得や機器の誤差も考慮できる機能を実装していく予定です。
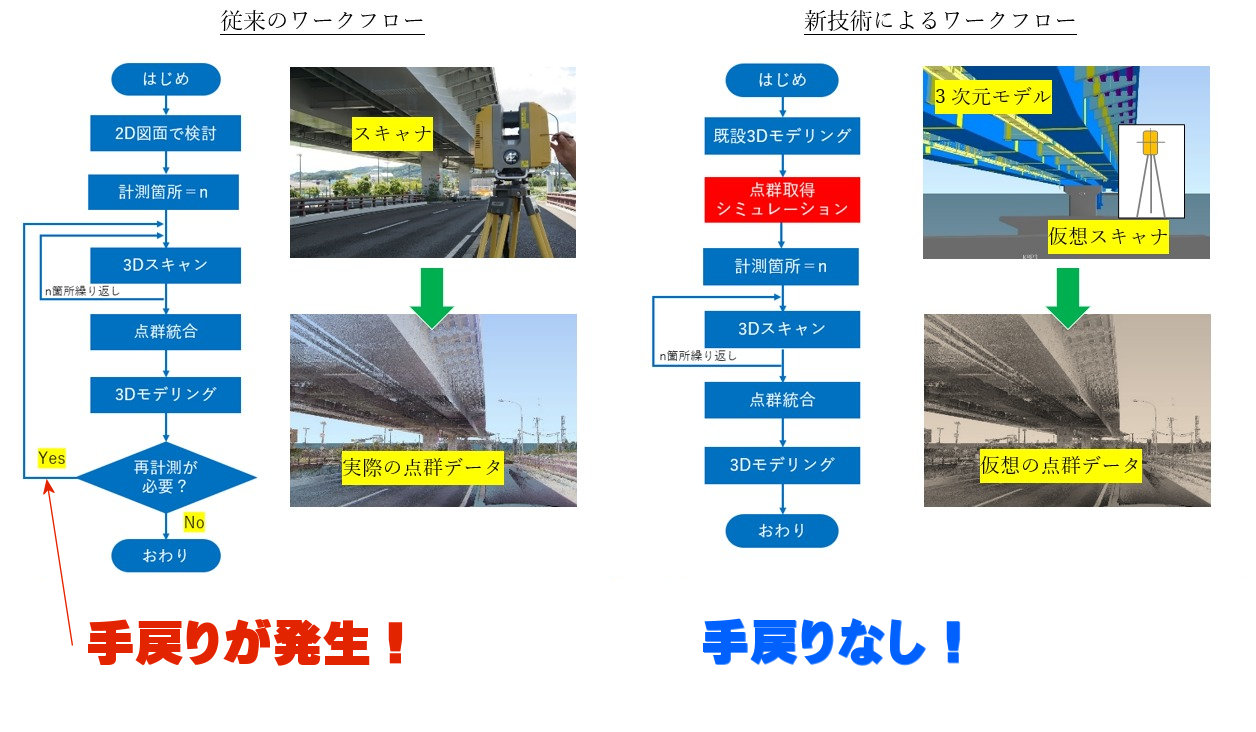
従来のワークフロー(左)は、点群の計測漏れがあると再計測という手戻りが発生した。点群取得シミュレーターを使った新しいワークフロー(右)では手戻りがなく、生産性が上がる
オフィスケイワンでは、この点群取得シミュレーターを自社の点群計測技術の向上に生かすほか、将来は外販も検討していくとのことです。
暑い中、重い3Dスキャナーや三脚を持って歩き回るのは大変ですし、再計測ややり直しだと、心が折れそうになることもあるでしょう。
こうした作業を、事前にシミュレーションしてスムーズに行えるようになると、生産性が上がるだけでなく、やる気も出てきそうですね。