管理人のイエイリです。
山岳トンネル工事の自動化技術の開発をめぐっては、大手・中堅ゼネコンがしのぎを削っています。
そのクライマックスとも言えるのが、危険を伴う掘削最前線の「切羽」での火薬装てん作業です。
火薬と言っても、液体や粉体をソーセージ状の袋につめたやわらかいものもあるので、切羽に削孔された穴に入れる作業や、込め棒による押し固めには微妙な力加減が必要です。また雷管や配線といった危険なものもついているので、手指の感覚も必要となります。
そこで大林組と慶應義塾大学の野崎貴裕准教授らの研究グループはまず、この作業をロボットによる遠隔操作で行うことに挑戦しています。
切羽で装てん作業をするロボットの力加減が、遠隔操作するオペレーターにわかるようにするために、
ナ、ナ、ナ、ナント、
遠隔で力触覚を再現
する「リアルハブティクス」という技術を活用しているのです。(大林組のプレスリリースはこちら)
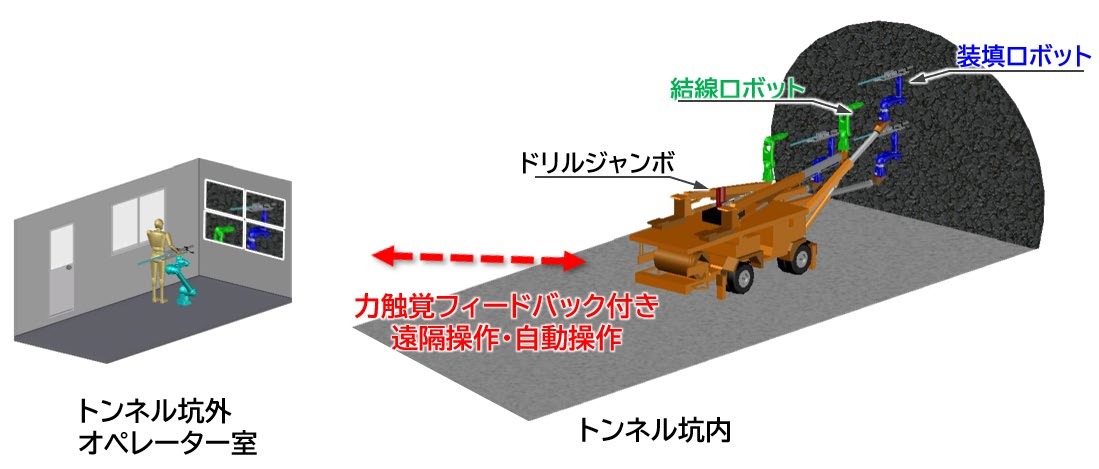
火薬装てんの遠隔操作イメージ(以下の資料、写真:大林組)

切羽で作業するロボット(左)にかかる力が、遠隔操作するオペレーター(右)の巨大なコントローラーにも、フィードバックされる
通常の遠隔操作は、オペレーターのコントローラーの指示通りにロボットが動くだけですが、リアルハブティクス装置によって、ロボットのアームにかかる力がオペレーターにフィードバックされる双方向性があるのが、今回のシステムの特長です。
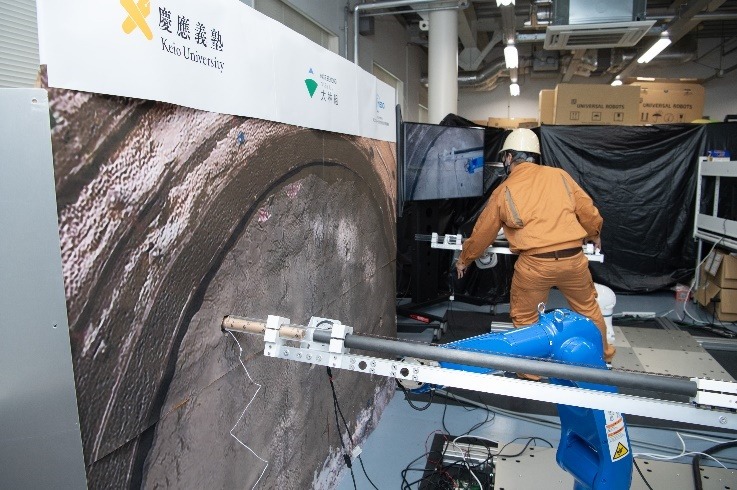
作業者は、ロボット側から送信される映像を視覚で確認しながら、込め棒やパイプの抵抗が力触覚として再現されたリモコン側を操作します。すると、安全な場所から実際の装薬孔に火薬を装填しているかのような感触で作業を行うことができます。
一方、ロボット側では、オペレーターがコントローラー操作で動かした込め棒やパイプの角度、力の入れ具合をリアルタイムに再現します。
そのため現場の映像がはっきり見えなくても、「装てんパイプの先っちょが穴に入らず、切羽に当たったな」ということを、オペレーターはコントローラーの動きの「かたさ」を通じて感じることができます。
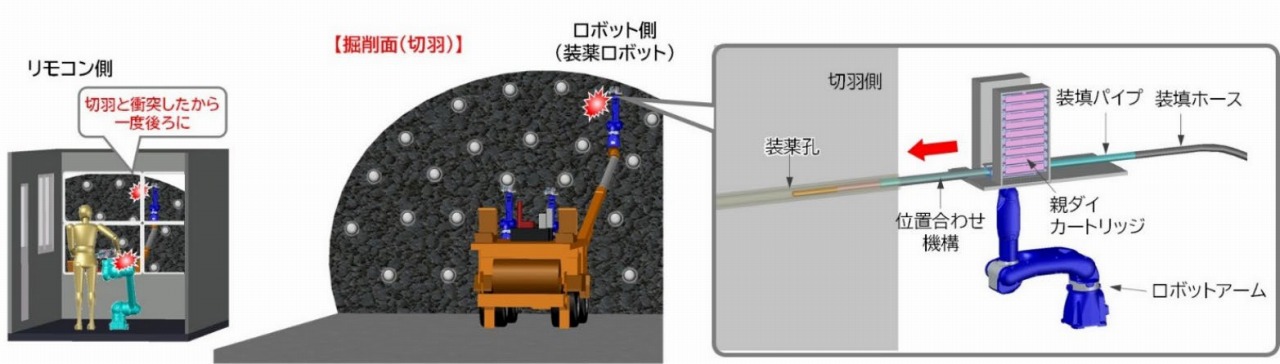
火薬装てん作業のイメージ。ロボット(右)の装てんパイプが切羽に当たったとき、遠隔操作オペレーター(左)はコントローラーの「かたさ」からそのことがわかる
切羽にパイプが当たる(手前)と、遠隔操作のオペレーター(奥)もそれを感じることができる
この装置にはロボットからの反力データやオペレーターの操作データを記録する機能が付いています。
そのため、オペレーターが火薬の装てん作業を遠隔操作で繰り返し行うことで、
データを自律学習
し、作業の自動化することもできるのです。
この研究は、NEDO(国立研究開発法人新エネルギー・産業技術総合開発機構)の「若サポ」(官民による若手研究者発掘支援事業)の一環として行われています。
このほか、リアルハブティクス技術を搭載した結線ロボットを使って、切羽との接触を感知しながら、電気雷管の脚線と発破用の配線を自動結線するシステムなどの開発も進めて、最終的には装てん、結線の自律化を進めていく方針です。
この研究成果は、土木学会第78回年次学術講演会(2023年9月11~15日)や、土木学会第33回トンネル工学研究発表会(同11月21~22日)で発表するほか、CEATEC2023(同10月17~20日)や2023国際ロボット展(同11月29日~12月2日)でも出展とデモンストレーションを予定しているとのことです。
いよいよ、山岳トンネル工事の完全自動化も視野に入ってきたようですね。