管理人のイエイリです。
山岳トンネル掘削工事では、掘削最前面の「切羽」付近で、掘削の過不足を目視確認していましたが、最近は安全のため3Dレーザースキャナーなどでの計測技術も開発されています。
切羽付近には重機や作業員などが集まっているため、切羽からやや離れた場所から計測せざるを得ず、計測精度が今一つという課題もあります。
一方、ドローン(無人機)にLiDARと呼ばれる3Dスキャナーを搭載して、遠隔で計測するという方法も開発されていますが、今度はドローンの飛行ルートに人や重機が入れないため、目視での確認よりも時間がかかってしまうという「ジレンマ」がありました。
そこで、大林組とトップライズ(本社:新潟市秋葉区)は、この問題を解決するため、新たなドローンの開発に成功しました。
GNSS(全地球測位システム)が利用できないトンネル坑内で、
ナ、ナ、ナ、ナント、
作業中の人や重機
などの動的障害物を回避しながら、自律飛行できるのです。(大林組のプレスリリースはこちら)
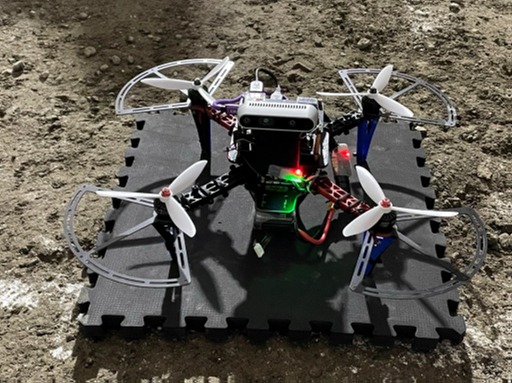
非GNSS環境下のトンネル坑内で、動いている人や重機を避けながら自律飛行できるドローン(以下の写真、資料:大林組)
このドローンには、センサー付きカメラが搭載されており、撮影した物体の距離と色を認識できます。そして、独自のアルゴリズムによって、動的障害物かどうかを判別します。
また、カメラ情報を使用して、ドローン搭載のコンピューターがトンネル坑内の3次元地図を生成し、非GNSS環境下でも自律飛行が可能です。
これらの機能により、人や重機などの動的障害物を避けながら、目的地への最適飛行ルートを自動生成できるのです。
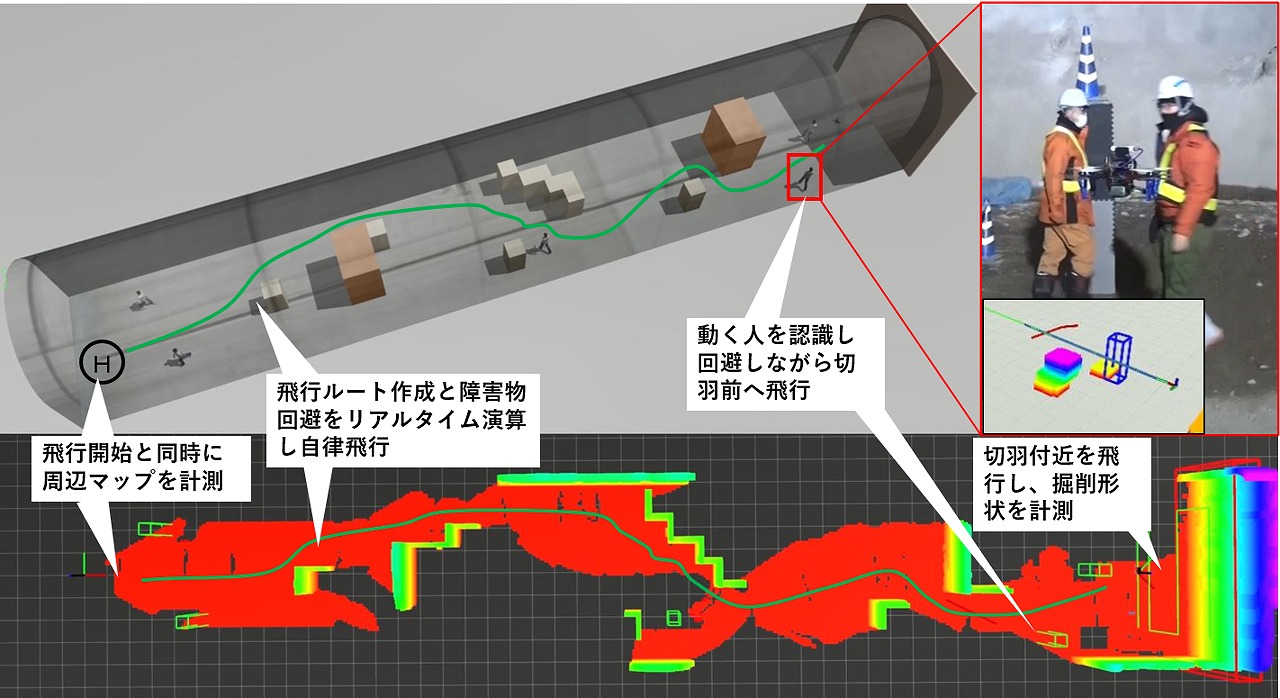
ドローンに搭載したカメラとコンピューターでトンネル内の3次元地図を作りながら、動的障害物を避けて切羽までたどり着ける
切羽まで無事、たどり着いたドローンは、カメラで撮影した複数の切羽映像から「SfM解析」によって切羽の掘削形状を3D計測し、設計値と比較します。
その結果は、掘削機の運転席にある
モニター上に表示
することができるので、オペレーターが直接、掘削不足の箇所を確認しながら掘削することができるのです。
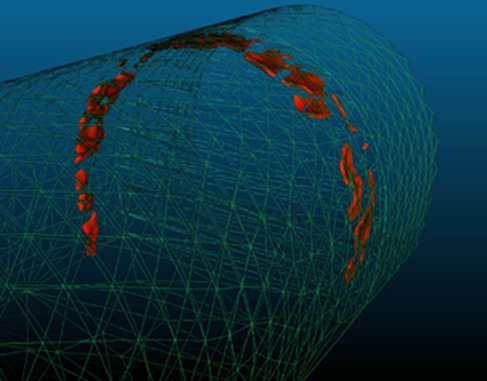
モニターに3D表示された掘削不足の箇所
これまでは、掘削不足の箇所を切羽直下にいる作業員が目視で確認し、レーザーポインターでオペレーターに指示していましたが、その必要もなくなります。
切羽付近に作業員が立ち入らないですむので、作業の安全性、生産性、施工精度が3拍子で向上します。
動的障害物を避けながらドローンを自律飛行される技術は、米国・カーネギーメロン大学機械工学科の嶋田憲司教授が主宰する、計算工学・ロボティクス研究室(CERLAB: Computational Engineering and Robotics Lab)の協力を得て開発しました。
トップライズは2017年ごろからカーネギーメロン大学に研究員を派遣し、農業用水路を点検する技術などの共同研究を行ってきました。(2018年9月26日のサクセスストーリーを参照)
大林組とトップライズは2023年度中に同大学からプログラミングや操作の技術移転を受け、今後はトンネル工事用の自律飛行ドローンを実用化するため、様々な条件下で実証実験をカネ猿予定です。
また、トンネル現場以外の他工種や建設業以外の分野での活用も視野に入れて開発を進めていく予定です。
ドローンと人・重機が同時に稼働できるようになることで、細かな「手待ちのムダ」などがなくなり、建設現場でのドローン活用のメリットがますます高まりそうですね。