



管理人のイエイリです。
最近、油圧ショベルやクローラーダンプ、タワークレーンなどの、テレワークを目的とした遠隔操作システムが続々と開発されています。
鹿島建設が鹿児島県南種子町で施工中の造成現場でも、このほど無人の振動ローラーが登場し、遠隔操作の実験が行われました。

鹿島建設の現場に登場した無人振動ローラー(以下の写真、資料:宇宙航空研究開発機構、鹿島建設)

無人振動ローラーの遠隔操作を行うオペレーター
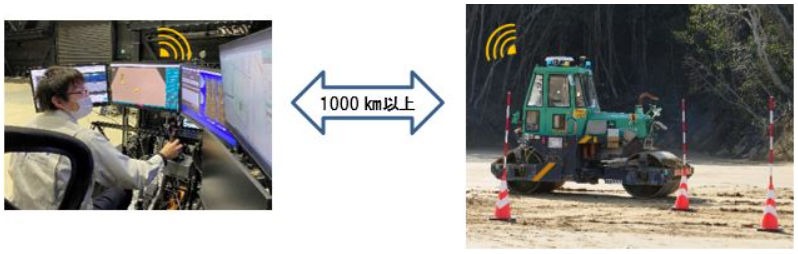
1000km以上離れて行われた遠隔操作実験のイメージ
遠隔操作を行うコックピットは、神奈川県相模原市のJAXA相模原キャンパスに設置されました。
距離から言うと、2021年5月14日付けの当ブログ記事で紹介した、キャタピラージャパンによる日米間の遠隔操作実験より短いですが、構想のスケールが違います。
ナ、ナ、ナ、ナント、
地球から月面の建機
を遠隔操作することが目的に行われた実験なのです。(宇宙航空研究開発機構、鹿島建設のプレスリリースはこちら)
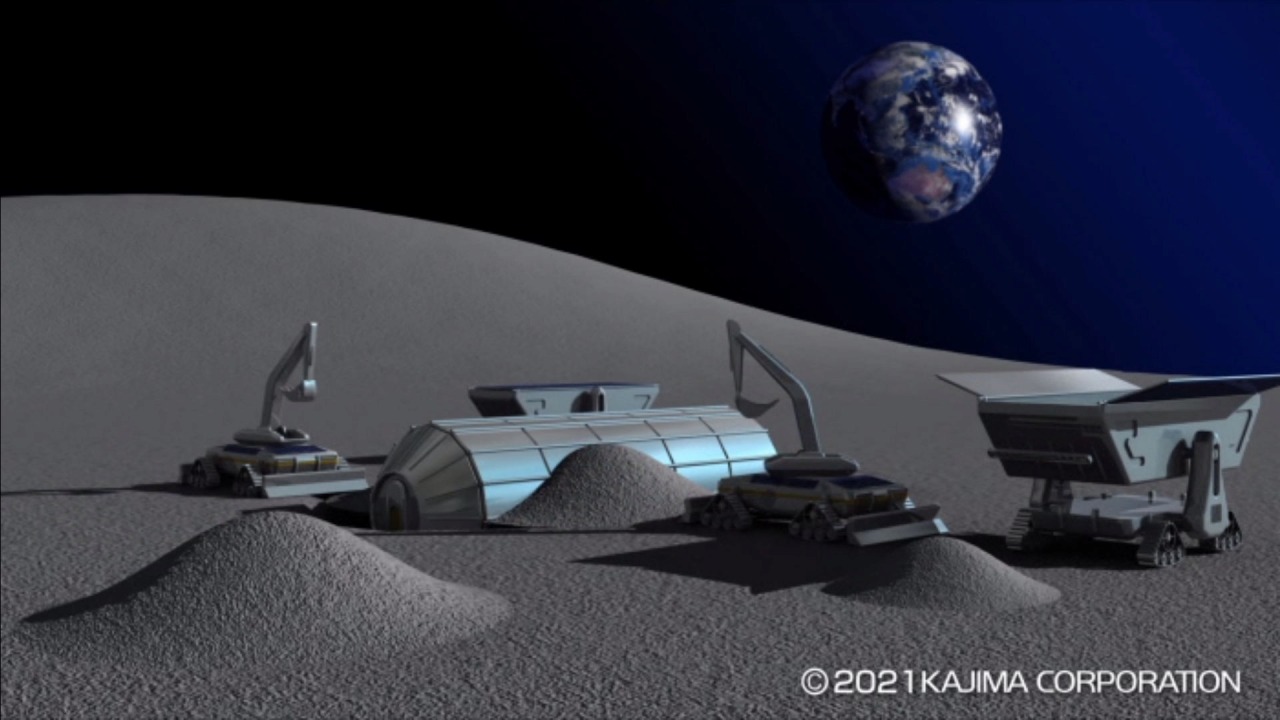
月面での無人化施工イメージ
この実験は宇宙航空研究開発機構(以下、JAXA)と鹿島建設が共同で行ったものです。
実験の内容は、JAXA相模原キャンパスから、1000km以上離れたJAXA種子島宇宙センターの振動ローラーを遠隔操作し、さらに自動運転に切り替えて所定の範囲の締め固めを行うというものでした。

JAXA種子島宇宙センターの造成現場
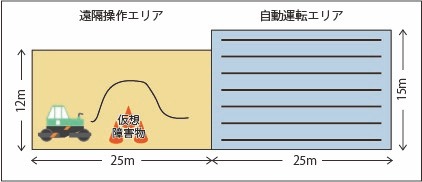
遠隔操作の手順。月面のクレーターに見立てた仮想障害物を遠隔操作で回避して現場にたどり着き、自動運転に切り替えて25m×15mの範囲を締め固める
鹿島建設は既に、建機の自動運転による「A4CSEL(クワッドアクセル)」という無人化施工システムを開発しており、2015年から様々なダム工事に導入しています。そのため、これくらいの締め固め作業は朝飯前です。

自動運転モードで締め固めを行う振動ローラー
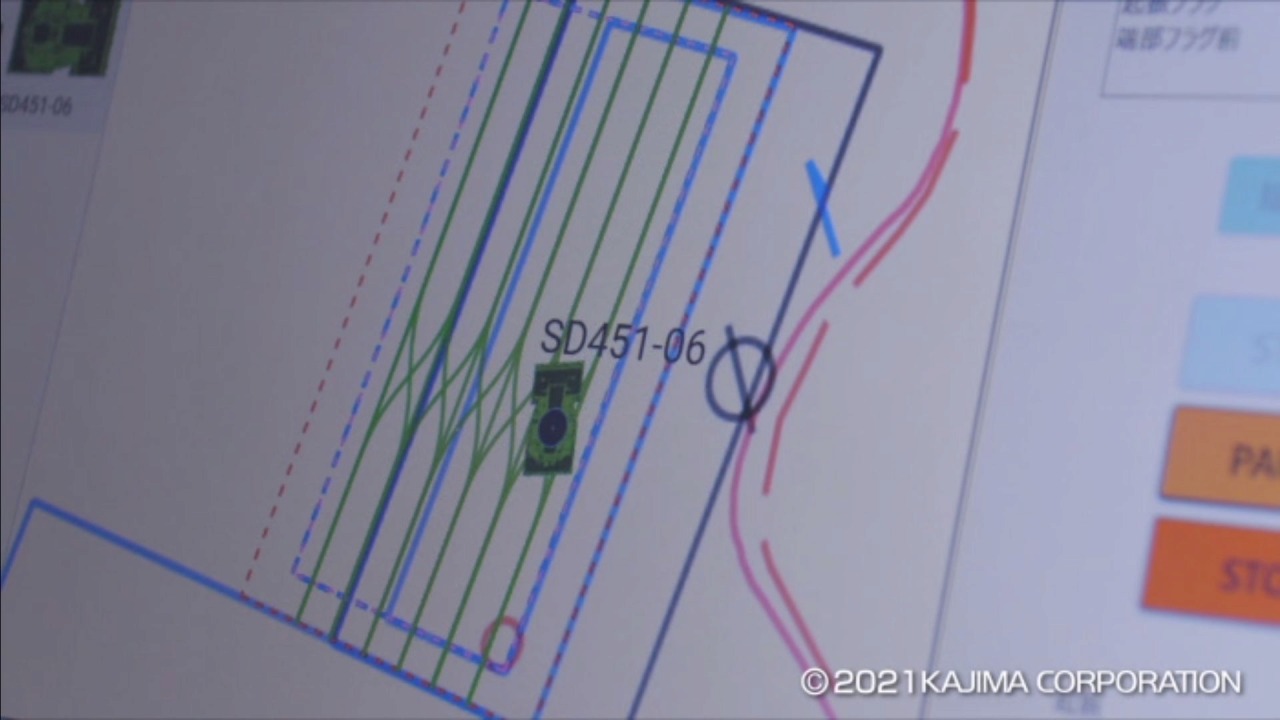
振動ローラーの軌跡
しかしながら、月面工事ならではの難問がありました。それは、最初にクレーターに見立てた仮想障害物を避けて走行する遠隔操作です。
現場から送られてくる映像をモニターで見ながら遠隔操作するのですが、地球と月までの距離は約38万kmもあるので、
電波が届くのに1秒以上
かかってしまうからです。
そのため、モニターで見える映像は1秒以上前のものであり、遠隔操作レバーを動かしても、その命令が月面の建機に届くのは1秒以上後になります。
実験は、こうした時間遅れも再現して行われましたが、鹿島建設のウェブサイトで公開されている動画を見ると、見事に障害物をクリアしていることがわかります。

時間遅れを再現した遠隔操作によって、仮想障害物をクリアする振動ローラー
しかし、数秒単位の時間遅れがある中で「障害物が近づいてきたぞ→ハンドルを切ろう」というような「フィードバック的」な遠隔遠隔だと、イライラ感が募りそうです。
この時間遅れ問題を解決するためには、建機の数秒先の動きをシミュレーションして画面に表示する「フィードフォワード」的な技術開発が必要になるかもしれませんね。
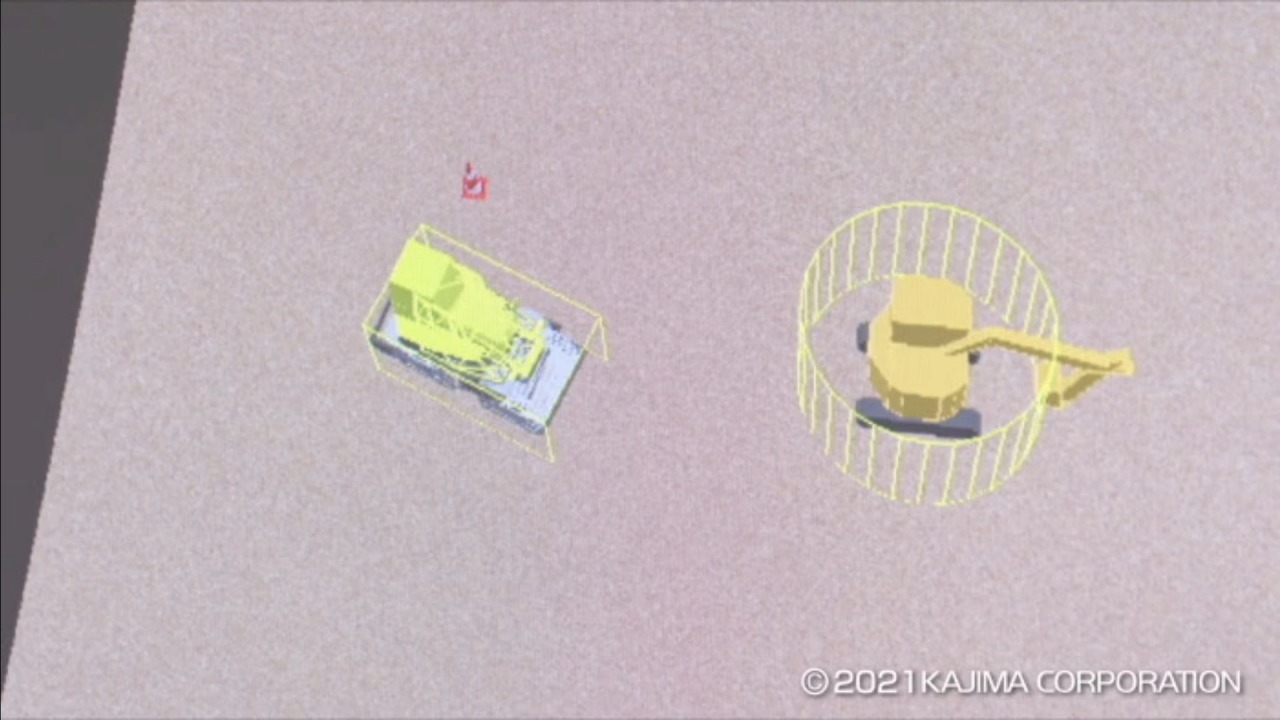
建機の動きを表示するモニター画面のイメージ。普通の遠隔操作ならリアルタイム表示でよいが、月面での工事となると数秒先の建機の動きを表示する技術が求められそうだ












