管理人のイエイリです。
縦横にびっしりと並んだモニター。よく見るとハンドルやレバー、アクセルと思われる装置も付いています。そして座席には、ヘルメットをかぶったオペレーターの姿が。
北海道西部の余市と倶知安の間で施工中の「新稲穂トンネル」(R側仁木工区)の現場に、ゲームセンターにあるレーシングゲームのようなコックピットが登場しました。

「新稲穂トンネル」の坑内に登場したレーシングゲームを思わせるコックピット。トラックの荷台に積まれていた(以下の写真、資料:西松建設)
いったい、現場で何のゲームを楽しんでいるのかと思いきや、
ナ、ナ、ナ、ナント、
実物のホイールローダー
を遠隔操縦していたのです。(西松建設のプレスリリースはこちら)

コックピットで操縦していたのは、掘削最前線の「切羽」付近で働くホイールローダーだった
このホイールローダーは、トンネルの掘削最前線である切羽(きりは)で、発破後の土砂(ずり)をすくい、運んだりクラッシャー(破砕機)に投入したりする作業を担っています。
このシステムは、(1)遠隔操作システム、(2)映像・制御信号通信システム、(3)安全走行管理システムで構成され、西松建設がカナモト(本社:札幌市中央区)、浅草ギ研(本社:東京都荒川区)、ジオマシンエンジニアリング(本社:東京都荒川区)と共同で開発しました。
遠隔操作室のコックピットには、現場の映像をリアルタイムで伝える9画面のモニターのほか、ステアリング、ブレーキ・アクセルペダル、アーム・バケットレバーが実機と同じ仕様で備えつけてあります。
そして運転時の実機振動や作動音も伝わるようになっているので、実機の運転とほぼ同じ環境での遠隔操作が可能です。
ホイールローダーには、7台のフルHD車載カメラや制御盤のほか、運転席のハンドルやブレーキペダル、アーム・バケットレバーには、それぞれ電動モーターやアクチュエーターなどが取り付けられ、コックピットのオペレーターの操作に従って操作します。
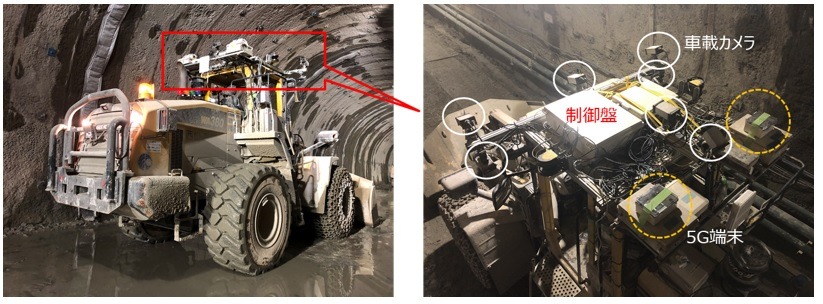
ホイールローダーに取り付けられた車載カメラや制御盤
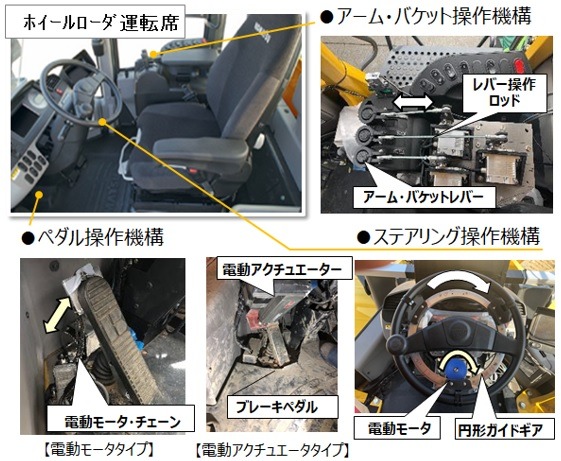
運転席のハンドルやペダルに取り付けられた電動モーターやアクチュエーター
トンネル坑内という狭い場所で走行したり、クラッシャーに投入したりという細かい作業をホイールローダーで行うためには、映像や操作信号の伝送に遅れがあるとうまくいきません。
そこでトンネル坑内に、
28GHzのローカル5G回線
を日本で初めて構築しました。
ローカル5Gの電波を送受信する基地局アンテナを高所作業車に設置し、ホイールローダーとの映像や操作信号を無線伝送するとともに、遠隔操作室のコックピットとは光ファイバーケーブルを介して有線伝送します。

高所作業車に設置したローカル5Gの基地局
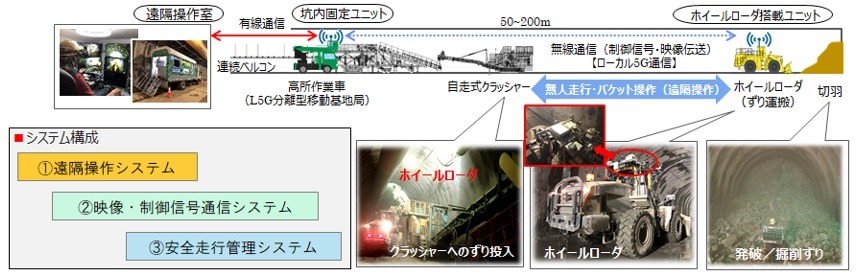
システムの全体構成
低遅延の5G回線のおかげで、運転操作に大きく影響する映像伝送の遅れや通信上の不具合はなく、坑内でも有人運転に近い時速20km程度の走行や、クラッシャー投入時の微妙なバケット操作もできました。
この技術の開発は、国土交通省の「建設現場の生産性を飛躍的に向上するための革新的技術の導入・活用に関するプロジェクト」(PRISM)に選定されています。
西松建設では、今回のシステムをはじめ山岳トンネル無人化施工システム「Tunnel RemOS(トンネルリモス)」の構築を急ピッチで進めており、トンネル掘削作業の完全無人化の早期実現を目指しています。

山岳トンネル無人化施工システムの構想
かつては「KKD(経験・勘・度胸)」で勝負した山岳トンネルの施工ですが、いまや「データ」で勝負する時代になり、無人化施工技術も各社で進んでいます。
当ブログでここ数年、紹介した事例でも鹿島、大成建設、清水建設、安藤ハザマ、熊谷組、前田建設工業、など、枚挙にいとまがありません。